 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid Artificial Intelligence Method for Estimating Flicker in Power Systems
Jun 16, 2025This paper introduces a novel hybrid AI method combining H filtering and an adaptive linear neuron network for flicker component estimation in power distribution systems.The proposed method leverages the robustness of the H filter to extract the voltage envelope under uncertain and noisy conditions followed by the use of ADALINE to accurately identify flicker frequencies embedded in the envelope.This synergy enables efficient time domain estimation with rapid convergence and noise resilience addressing key limitations of existing frequency domain approaches.Unlike conventional techniques this hybrid AI model handles complex power disturbances without prior knowledge of noise characteristics or extensive training.To validate the method performance we conduct simulation studies based on IEC Standard 61000 4 15 supported by statistical analysis Monte Carlo simulations and real world data.Results demonstrate superior accuracy robustness and reduced computational load compared to Fast Fourier Transform and Discrete Wavelet Transform based estimators.
A Novel Multi-Criteria Local Latin Hypercube Refinement System for Commutation Angle Improvement in IPMSMs
Mar 05, 2025

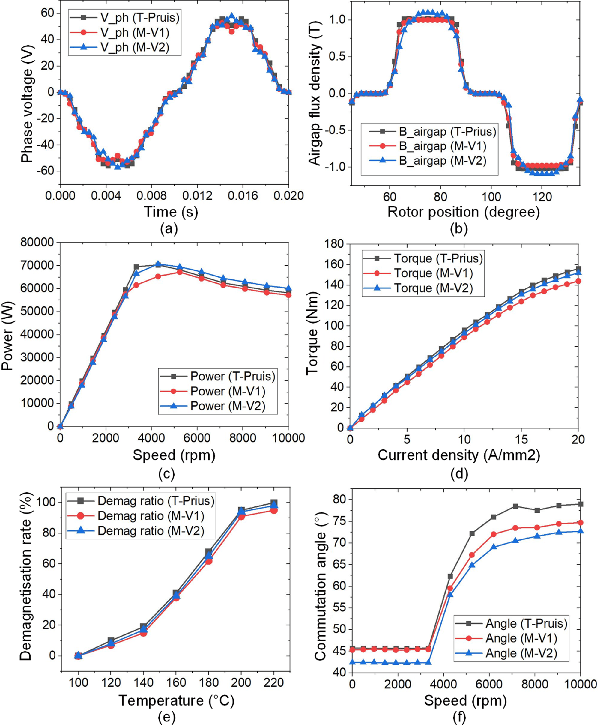

The commutation angle is defined as the angle between the fundamental of the motor phase current and the fundamental of the back-EMF. It can be utilised to provide a compensating effect in IPMSMs. This is due to the reluctance torque component being dependent on the commutation angle of the phase current even before entering the extended speed range. A real-time maximum torque per current and voltage strategy is demonstrated to find the trajectory and optimum commutation angles, gamma, where the level of accuracy depends on the application and available computational speed. A magnet volume reduction using a novel multi-criteria local Latin hypercube refinement (MLHR) sampling system is also presented to improve the optimisation process. The proposed new technique minimises the magnet mass to motor torque density whilst maintaining a similar phase current level. A mapping of gamma allows the determination of the optimum angles, as shown in this paper. The 3rd generation Toyota Prius IPMSM is considered as the reference motor, where the rotor configuration is altered to allow for an individual assessment.
Navigating Intelligence: A Survey of Google OR-Tools and Machine Learning for Global Path Planning in Autonomous Vehicles
Mar 05, 2025We offer a new in-depth investigation of global path planning (GPP) for unmanned ground vehicles, an autonomous mining sampling robot named ROMIE. GPP is essential for ROMIE's optimal performance, which is translated into solving the traveling salesman problem, a complex graph theory challenge that is crucial for determining the most effective route to cover all sampling locations in a mining field. This problem is central to enhancing ROMIE's operational efficiency and competitiveness against human labor by optimizing cost and time. The primary aim of this research is to advance GPP by developing, evaluating, and improving a cost-efficient software and web application. We delve into an extensive comparison and analysis of Google operations research (OR)-Tools optimization algorithms. Our study is driven by the goal of applying and testing the limits of OR-Tools capabilities by integrating Reinforcement Learning techniques for the first time. This enables us to compare these methods with OR-Tools, assessing their computational effectiveness and real-world application efficiency. Our analysis seeks to provide insights into the effectiveness and practical application of each technique. Our findings indicate that Q-Learning stands out as the optimal strategy, demonstrating superior efficiency by deviating only 1.2% on average from the optimal solutions across our datasets.