 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContextual and Possibilistic Reasoning for Coalition Formation
Jun 19, 2020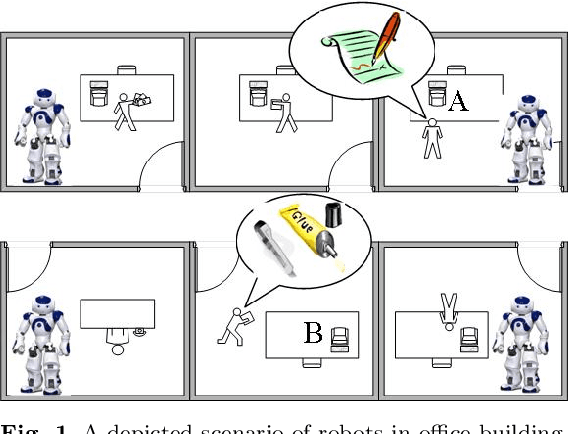

In multiagent systems, agents often have to rely on other agents to reach their goals, for example when they lack a needed resource or do not have the capability to perform a required action. Agents therefore need to cooperate. Then, some of the questions raised are: Which agent(s) to cooperate with? What are the potential coalitions in which agents can achieve their goals? As the number of possibilities is potentially quite large, how to automate the process? And then, how to select the most appropriate coalition, taking into account the uncertainty in the agents' abilities to carry out certain tasks? In this article, we address the question of how to find and evaluate coalitions among agents in multiagent systems using MCS tools, while taking into consideration the uncertainty around the agents' actions. Our methodology is the following: We first compute the solution space for the formation of coalitions using a contextual reasoning approach. Second, we model agents as contexts in Multi-Context Systems (MCS), and dependence relations among agents seeking to achieve their goals, as bridge rules. Third, we systematically compute all potential coalitions using algorithms for MCS equilibria, and given a set of functional and non-functional requirements, we propose ways to select the best solutions. Finally, in order to handle the uncertainty in the agents' actions, we extend our approach with features of possibilistic reasoning. We illustrate our approach with an example from robotics.