Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrediction of Lane Number Using Results From Lane Detection
Dec 04, 2020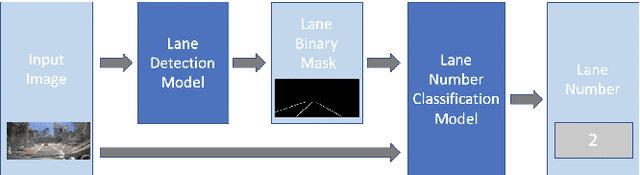
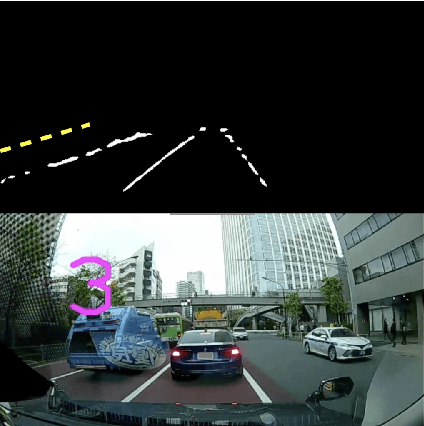
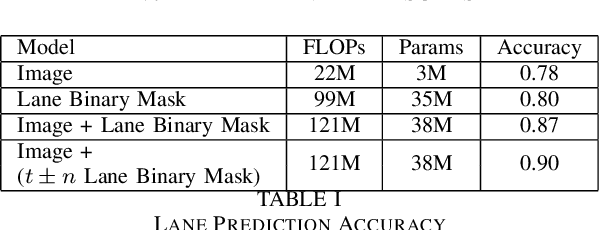
The lane number that the vehicle is traveling in is a key factor in intelligent vehicle fields. Many lane detection algorithms were proposed and if we can perfectly detect the lanes, we can directly calculate the lane number from the lane detection results. However, in fact, lane detection algorithms sometimes underperform. Therefore, we propose a new approach for predicting the lane number, where we combine the drive recorder image with the lane detection results to predict the lane number. Experiments on our own dataset confirmed that our approach delivered outstanding results without significantly increasing computational cost.
* GCCE 2020
Via