Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry-Based Grasping of Vine Tomatoes
Mar 01, 2021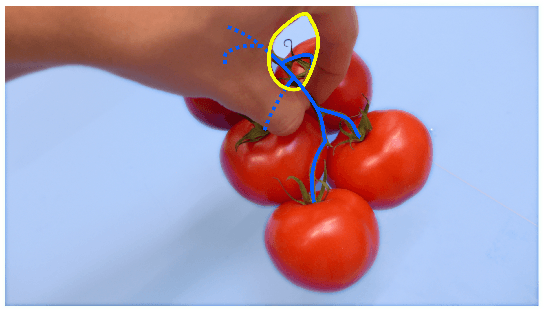
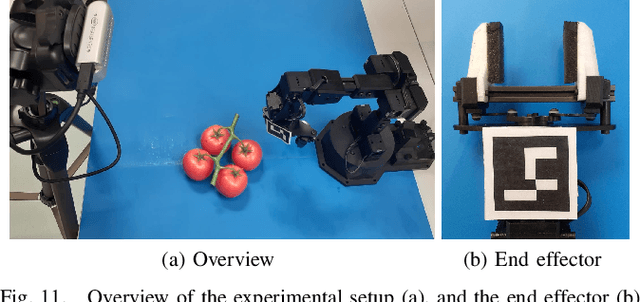
We propose a geometry-based grasping method for vine tomatoes. It relies on a computer-vision pipeline to identify the required geometric features of the tomatoes and of the truss stem. The grasping method then uses a geometric model of the robotic hand and the truss to determine a suitable grasping location on the stem. This approach allows for grasping tomato trusses without requiring delicate contact sensors or complex mechanistic models and under minimal risk of damaging the tomatoes. Lab experiments were conducted to validate the proposed methods, using an RGB-D camera and a low-cost robotic manipulator. The success rate was 83% to 92%, depending on the type of truss.
* 8 pages, 12 figures. This work has been submitted to the IEEE for
possible publication (IROS + RAL). Copyright may be transferred without
notice, after which this version may no longer be accessible
Via