Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomating Geometric Proofs of Collision Avoidance with Active Corners
Jul 15, 2022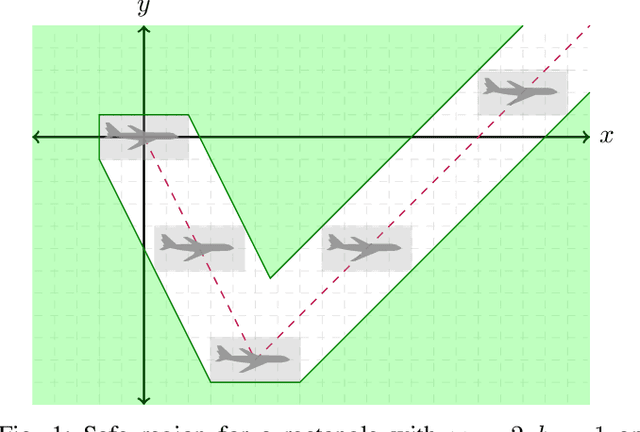
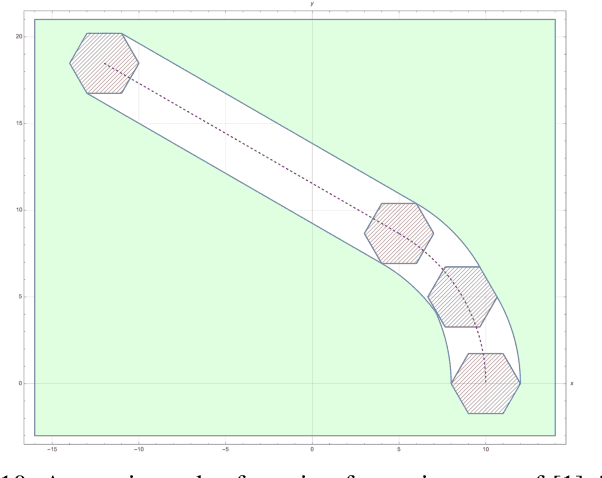
Avoiding collisions between obstacles and vehicles such as cars, robots or aircraft is essential to the development of automation and autonomy. To simplify the problem, many collision avoidance algorithms and proofs consider vehicles to be a point mass, though the actual vehicles are not points. In this paper, we consider a convex polygonal vehicle with nonzero area traveling along a 2-dimensional trajectory. We derive an easily-checkable, quantifier-free formula to check whether a given obstacle will collide with the vehicle moving on the planned trajectory. We apply our method to two case studies of aircraft collision avoidance and study its performance.
* 13 pages, 11 figures, conference paper
Via