 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Interaction via a Joint-Initiative Supervised Autonomy (JISA) Framework
Sep 10, 2021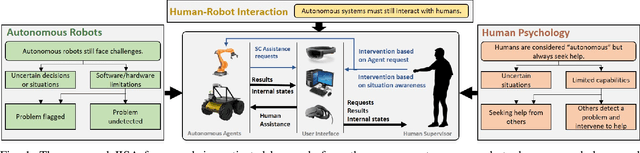
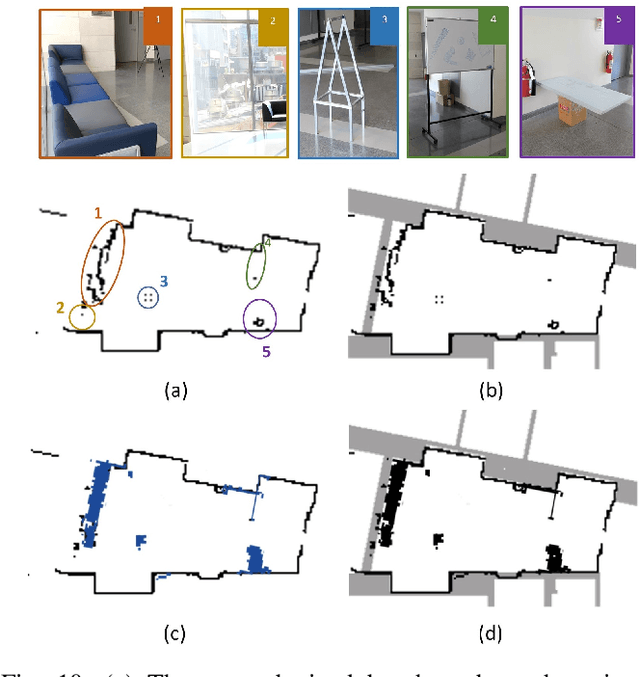
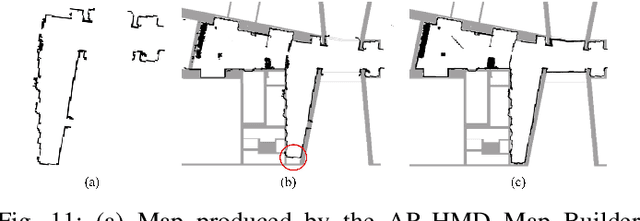
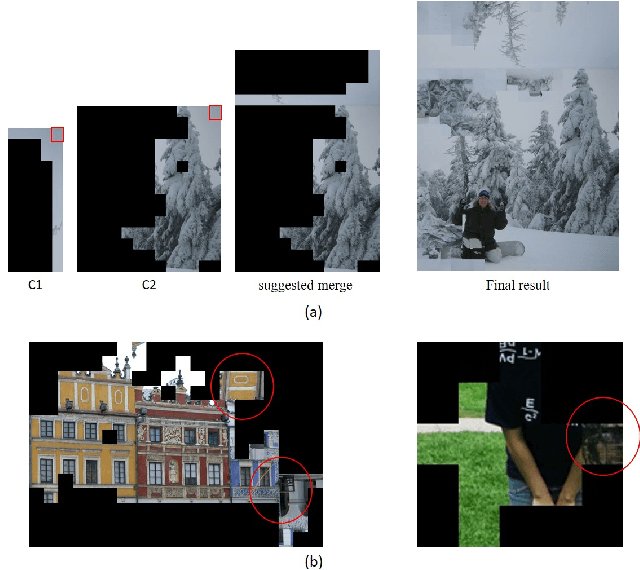
In this paper, we propose and validate a Joint-Initiative Supervised Autonomy (JISA) framework for Human-Robot Interaction (HRI), in which a robot maintains a measure of its self-confidence (SC) while performing a task, and only prompts the human supervisor for help when its SC drops. At the same time, during task execution, a human supervisor can intervene in the task being performed, based on his/her Situation Awareness (SA). To evaluate the applicability and utility of JISA, it is implemented on two different HRI tasks: grid-based collaborative simultaneous localization and mapping (SLAM) and automated jigsaw puzzle reconstruction. Augmented Reality (AR) (for SLAM) and two-dimensional graphical user interfaces (GUI) (for puzzle reconstruction) are custom-designed to enhance human SA and allow intuitive interaction between the human and the agent. The superiority of the JISA framework is demonstrated in experiments. In SLAM, the superior maps produced by JISA preclude the need for post processing of any SLAM stock maps; furthermore, JISA reduces the required mapping time by approximately 50 percent versus traditional approaches. In automated puzzle reconstruction, the JISA framework outperforms both fully autonomous solutions, as well as those resulting from on-demand human intervention prompted by the agent.
Marine Locomotion: A Tethered UAV$-$Buoy System with Surge Velocity Control
Jul 30, 2021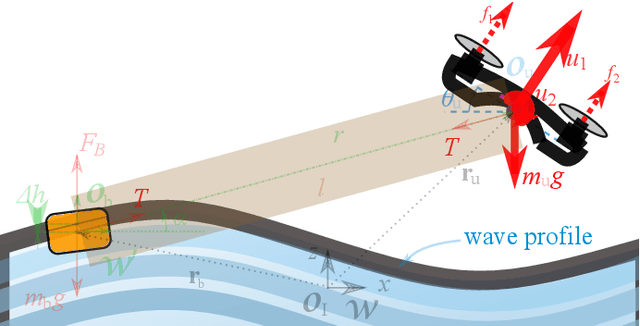
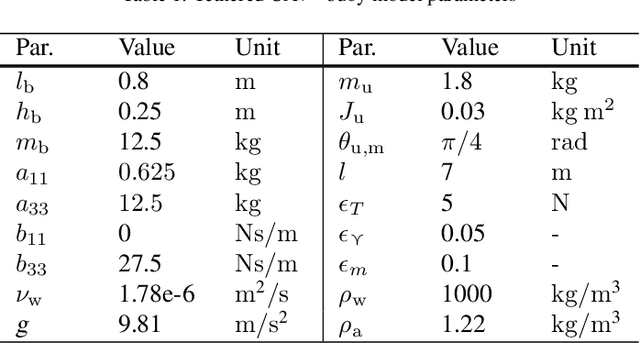
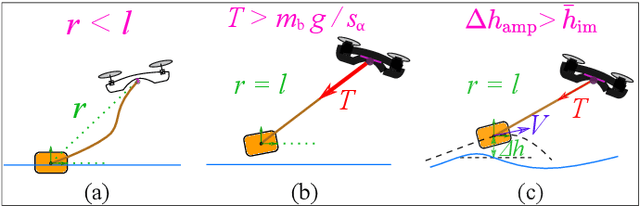
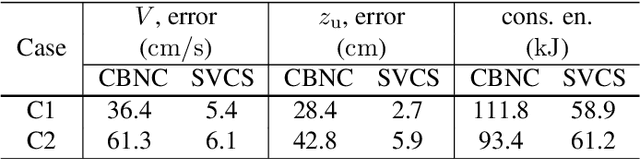
Unmanned aerial vehicles (UAVs) are reaching offshore. In this work, we formulate the novel problem of a marine locomotive quadrotor UAV, which manipulates the surge velocity of a floating buoy by means of a cable. The proposed robotic system can have a variety of novel applications for UAVs where their high speed and maneuverability, as well as their ease of deployment and wide field of vision, give them a superior advantage. In addition, the major limitation of limited flight time of quadrotor UAVs is typically addressed through an umbilical power cable, which naturally integrates with the proposed system. A detailed high-fidelity dynamic model is presented for the buoy, UAV, and water environment. In addition, a stable control system design is proposed to manipulate the surge velocity of the buoy within certain constraints that keep the buoy in contact with the water surface. Polar coordinates are used in the controller design process since they outperform traditional Cartesian-based velocity controllers when it comes to ensuring correlated effects on the tracking performance, where each control channel independently affects one control parameter. The system model and controller design are validated in numerical simulation under different wave scenarios.