 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Realistic 3D Non-Stationary Channel Model for UAV-to-Vehicle Communications Incorporating Fuselage Posture
Sep 19, 2022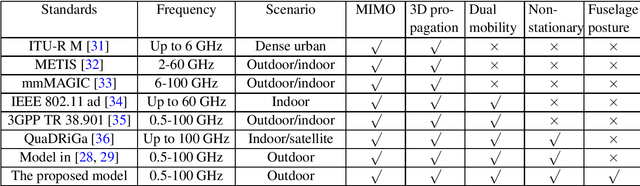
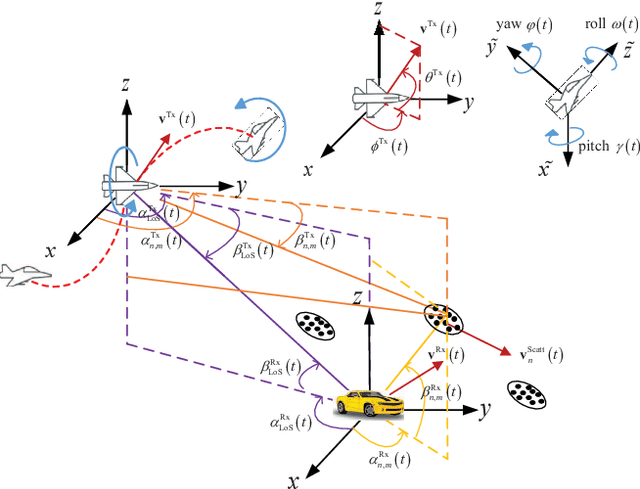
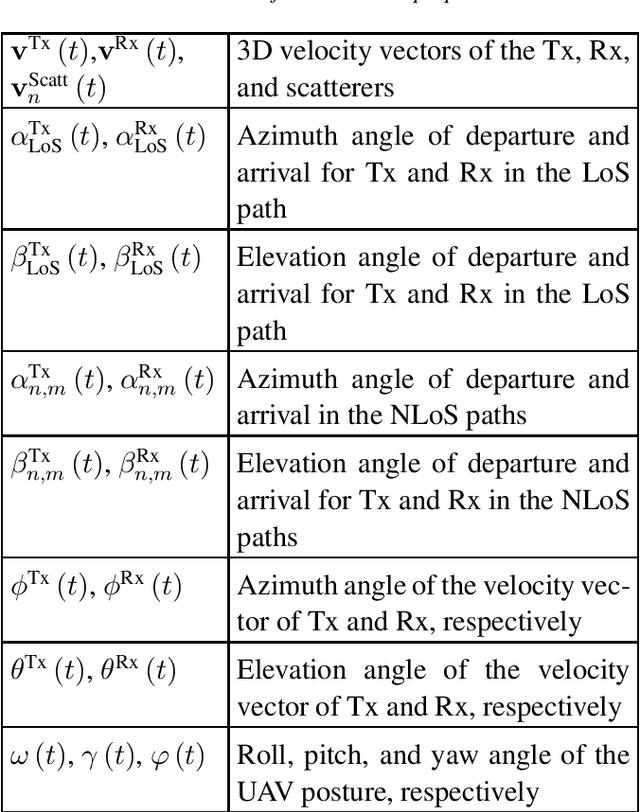
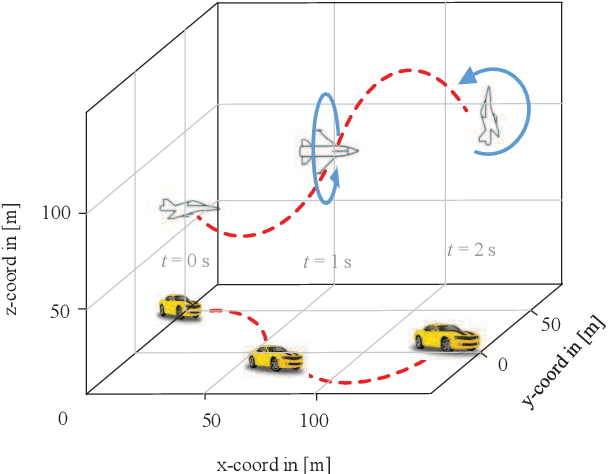
Considering the unmanned aerial vehicle (UAV) three-dimensional (3D) posture, a novel 3D non-stationary geometry-based stochastic model (GBSM) is proposed for multiple-input multiple-output (MIMO) UAV-to-vehicle (U2V) channels. It consists of a line-of-sight (LoS) and non-line-of-sight (NLoS) components. The factor of fuselage posture is considered by introducing a time-variant 3D posture matrix. Some important statistical properties, i.e. the temporal autocorrelation function (ACF) and spatial cross correlation function (CCF), are derived and investigated. Simulation results show that the fuselage posture has significant impact on the U2V channel characteristic and aggravate the non-stationarity. The agreements between analytical, simulated, and measured results verify the correctness of proposed model and derivations. Moreover, it is demonstrated that the proposed model is also compatible to the existing GBSM without considering fuselage posture.