 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA neural network based heading and position control system of a ship
Apr 02, 2022
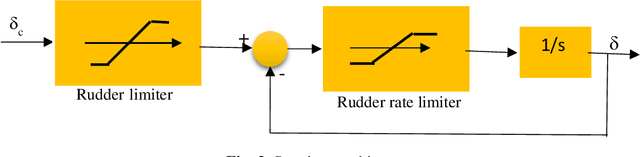
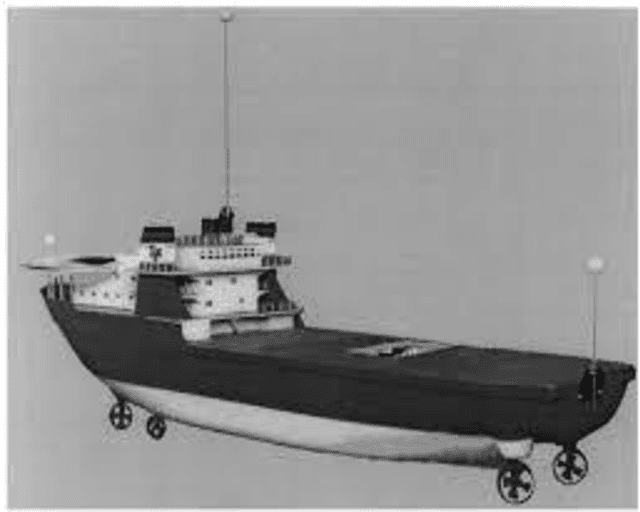

Heading and position control system of ships has remained a challenging control problem. It is a nonlinear multiple input multiple output system. Moreover, the dynamics of the system vary with operating as well as environmental conditions. Conventionally, simple Proportional Integral Derivative controller is used which has well known limitations. Other conventional control techniques have also been investigated but they require an accurate mathematical model of a ship. Unfortunately, accuracy of mathematical models is very difficult to achieve. During the past few decades computational intelligence techniques such as artificial neural networks have been very successful when an accurate mathematical model is not available. Therefore, in this paper, an artificial neural network controller is proposed for heading and position control system. For simulation purposes, a mathematical model with four effective thrusters have been chosen to test the performance of the proposed controller. The final closed loop system has been analyzed and tested through simulation studies. The results are very encouraging.
* 6 pages
Channel Equalization Using Multilayer Perceptron Networks
Apr 02, 2016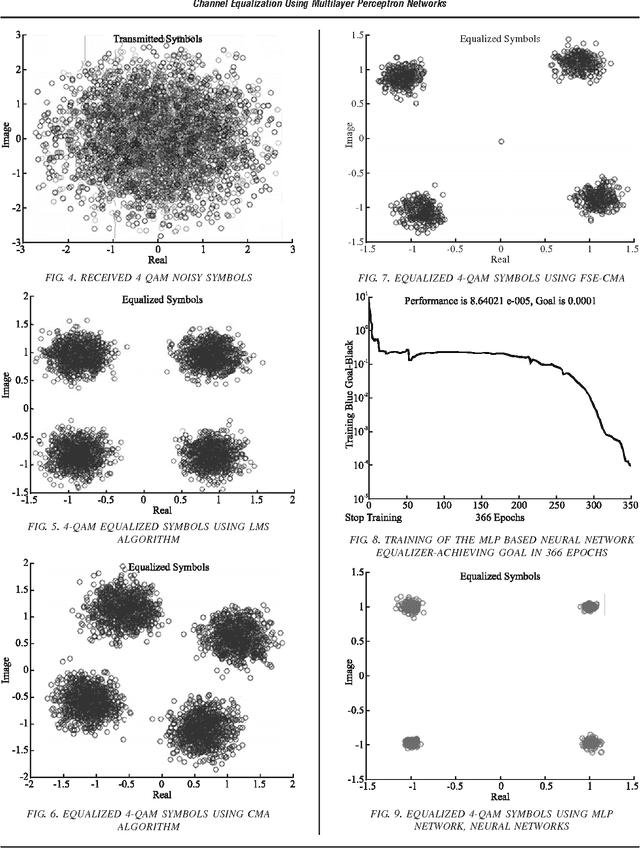
In most digital communication systems, bandwidth limited channel along with multipath propagation causes ISI (Inter Symbol Interference) to occur. This phenomenon causes distortion of the given transmitted symbol due to other transmitted symbols. With the help of equalization ISI can be reduced. This paper presents a solution to the ISI problem by performing blind equalization using ANN (Artificial Neural Networks). The simulated network is a multilayer feedforward Perceptron ANN, which has been trained by utilizing the error back-propagation algorithm. The weights of the network are updated in accordance with training of the network. This paper presents a very effective method for blind channel equalization, being more efficient than the pre-existing algorithms. The obtained results show a visible reduction in the noise content.
SAM: Support Vector Machine Based Active Queue Management
Apr 02, 2016
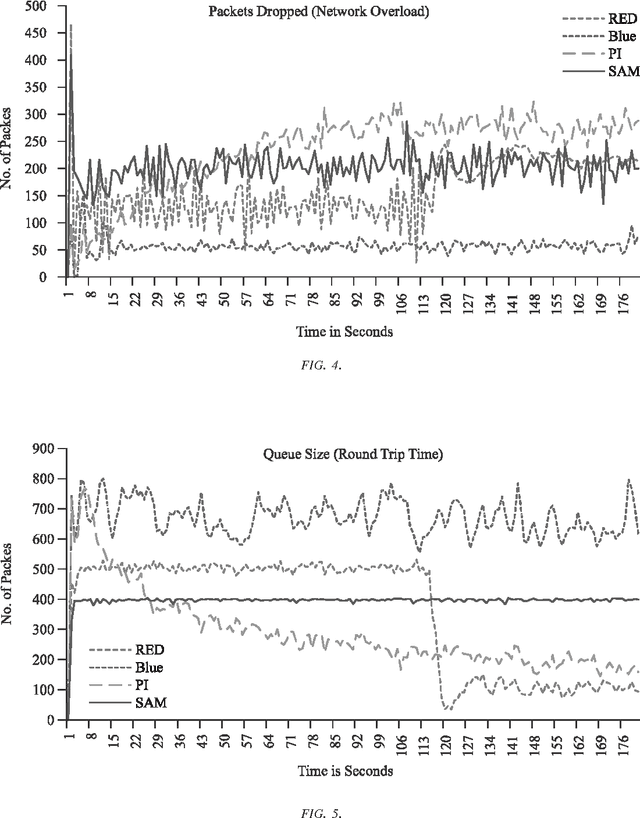
Recent years have seen an increasing interest in the design of AQM (Active Queue Management) controllers. The purpose of these controllers is to manage the network congestion under varying loads, link delays and bandwidth. In this paper, a new AQM controller is proposed which is trained by using the SVM (Support Vector Machine) with the RBF (Radial Basis Function) kernal. The proposed controller is called the support vector based AQM (SAM) controller. The performance of the proposed controller has been compared with three conventional AQM controllers, namely the Random Early Detection, Blue and Proportional Plus Integral Controller. The preliminary simulation studies show that the performance of the proposed controller is comparable to the conventional controllers. However, the proposed controller is more efficient in controlling the queue size than the conventional controllers.
pH Prediction by Artificial Neural Networks for the Drinking Water of the Distribution System of Hyderabad City
Apr 02, 2016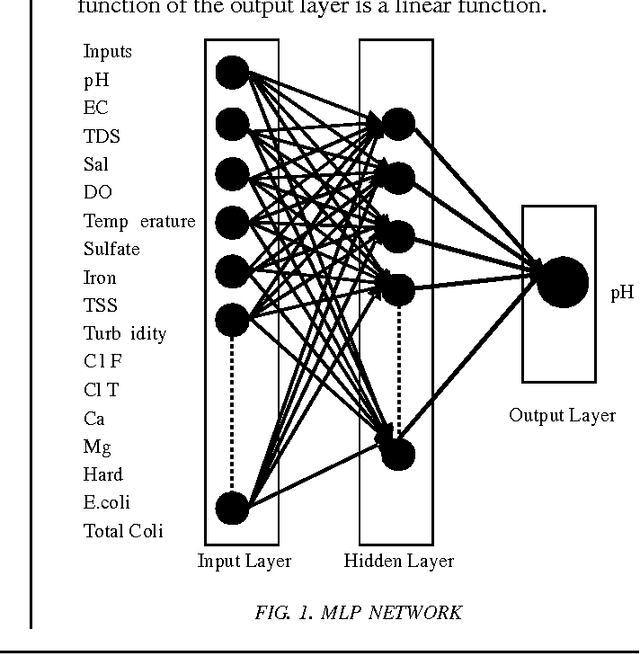
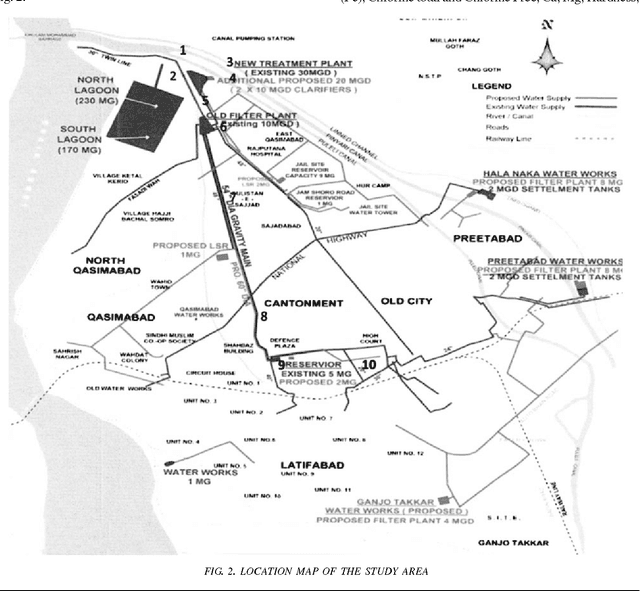
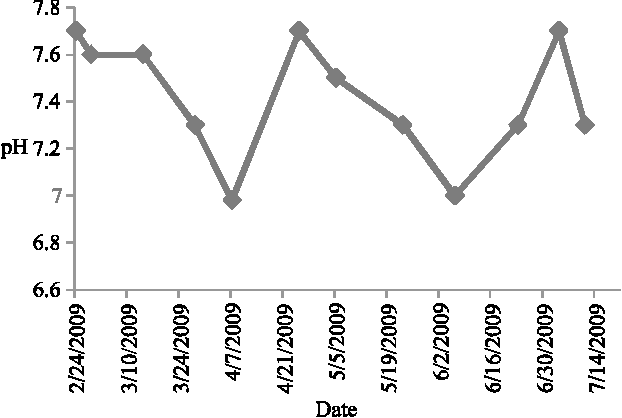
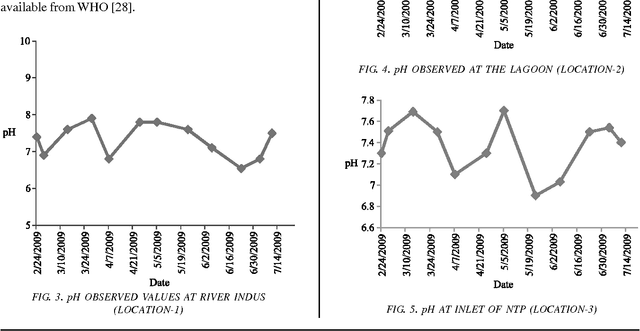
In this research, feedforward ANN (Artificial Neural Network) model is developed and validated for predicting the pH at 10 different locations of the distribution system of drinking water of Hyderabad city. The developed model is MLP (Multilayer Perceptron) with back propagation algorithm.The data for the training and testing of the model are collected through an experimental analysis on weekly basis in a routine examination for maintaining the quality of drinking water in the city. 17 parameters are taken into consideration including pH. These all parameters are taken as input variables for the model and then pH is predicted for 03 phases;raw water of river Indus,treated water in the treatment plants and then treated water in the distribution system of drinking water. The training and testing results of this model reveal that MLP neural networks are exceedingly extrapolative for predicting the pH of river water, untreated and treated water at all locations of the distribution system of drinking water of Hyderabad city. The optimum input and output weights are generated with minimum MSE (Mean Square Error) < 5%.Experimental, predicted and tested values of pH are plotted and the effectiveness of the model is determined by calculating the coefficient of correlation (R2=0.999) of trained and tested results.
Image Quality Assessment for Performance Evaluation of Focus Measure Operators
Apr 02, 2016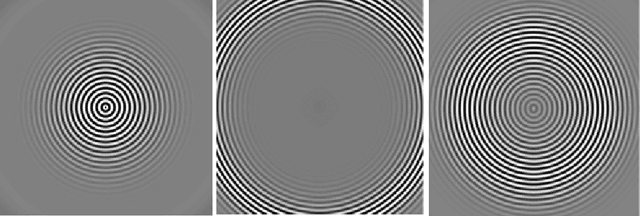
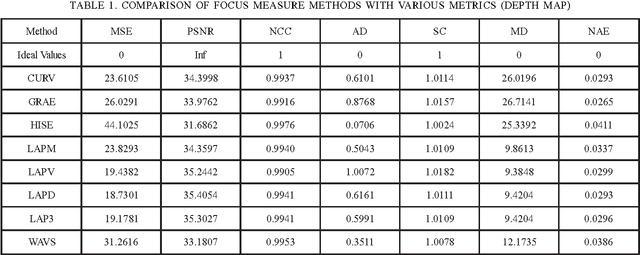


This paper presents the performance evaluation of eight focus measure operators namely Image CURV (Curvature), GRAE (Gradient Energy), HISE (Histogram Entropy), LAPM (Modified Laplacian), LAPV (Variance of Laplacian), LAPD (Diagonal Laplacian), LAP3 (Laplacian in 3D Window) and WAVS (Sum of Wavelet Coefficients). Statistical matrics such as MSE (Mean Squared Error), PNSR (Peak Signal to Noise Ratio), SC (Structural Content), NCC (Normalized Cross Correlation), MD (Maximum Difference) and NAE (Normalized Absolute Error) are used to evaluate stated focus measures in this research. . FR (Full Reference) method of the image quality assessment is utilized in this paper. Results indicate that LAPD method is comparatively better than other seven focus operators at typical imaging conditions.