 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMassively-Parallel Heat Map Sorting and Applications To Explainable Clustering
Sep 14, 2023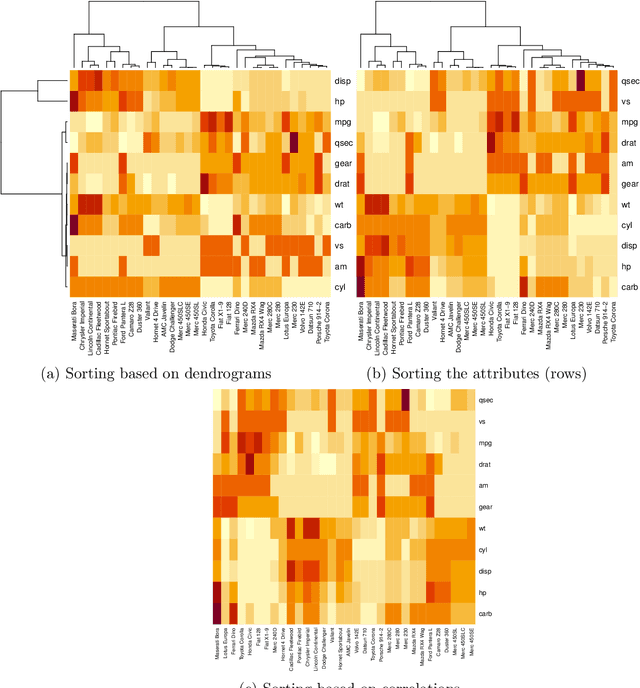



Given a set of points labeled with $k$ labels, we introduce the heat map sorting problem as reordering and merging the points and dimensions while preserving the clusters (labels). A cluster is preserved if it remains connected, i.e., if it is not split into several clusters and no two clusters are merged. We prove the problem is NP-hard and we give a fixed-parameter algorithm with a constant number of rounds in the massively parallel computation model, where each machine has a sublinear memory and the total memory of the machines is linear. We give an approximation algorithm for a NP-hard special case of the problem. We empirically compare our algorithm with k-means and density-based clustering (DBSCAN) using a dimensionality reduction via locality-sensitive hashing on several directed and undirected graphs of email and computer networks.
Online Fair Revenue Maximizing Cake Division with Non-Contiguous Pieces in Adversarial Bandits
Nov 29, 2021The classic cake-cutting problem provides a model for addressing the fair and efficient allocation of a divisible, heterogeneous resource among agents with distinct preferences. Focusing on a standard formulation of cake cutting, in which each agent must receive a contiguous piece of the cake in an offline setting, this work instead focuses on online allocating non-contiguous pieces of cake among agents and establishes algorithmic results for fairness measures. In this regard, we made use of classic adversarial multi-armed bandits to achieve sub-linear Fairness and Revenue Regret at the same time. Adversarial bandits are powerful tools to model the adversarial reinforcement learning environments, that provide strong upper-bounds for regret of learning with just observing one action's reward in each step by applying smart trade-off between exploration and exploitation. This work studies the power of the famous EXP_3 algorithm that is based on exponential wight{-}importance updating probability distribution through time horizon.
Randomized Strategy for Walking in Streets for a Simple Robot
Dec 08, 2015

We consider the problem of walking in an unknown street, for a robot that has a minimal sensing capability. The robot is equipped with a sensor that only detects the discontinuities in depth information (gaps) and can locate the target point as enters in its visibility region. First, we propose an online deterministic search strategy that generates an optimal search path for the simple robot to reach the target t, starting from s. In contrast with previously known research, the path is designed without memorizing any portion of the scene has seen so far. Then, we present a randomized search strategy, based on the deterministic strategy. We prove that the expected distance traveled by the robot is at most a 5.33 times longer than the shortest path to reach the target.