 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRIS-Assisted UAV for Timely Data Collection in IoT Networks
Mar 31, 2021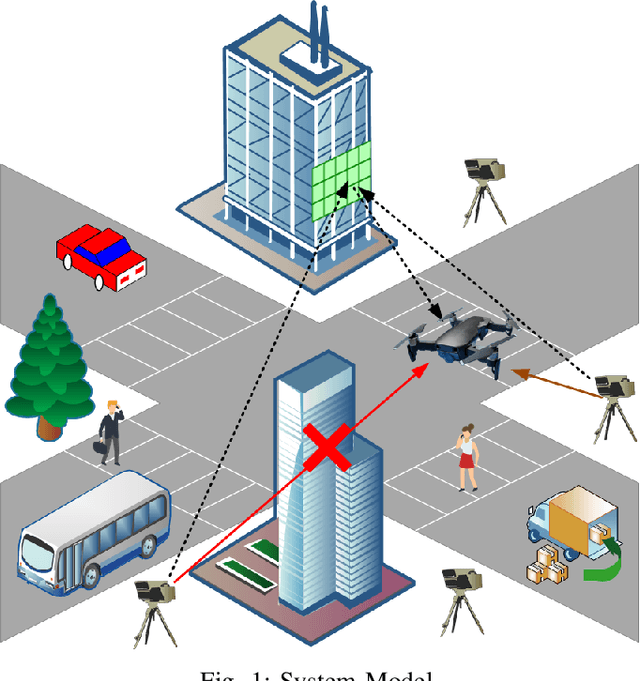
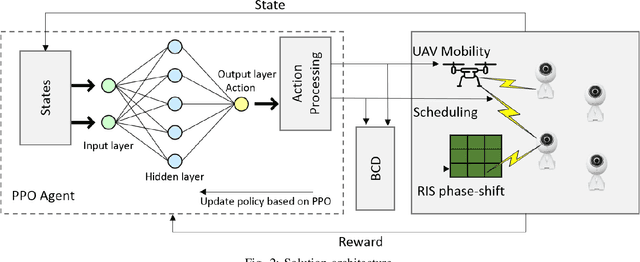
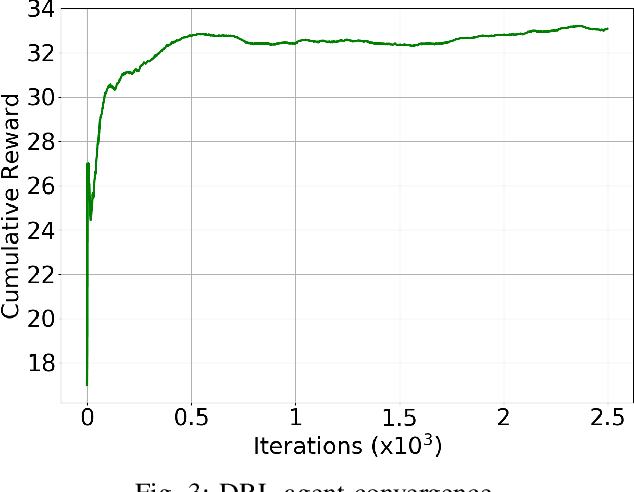
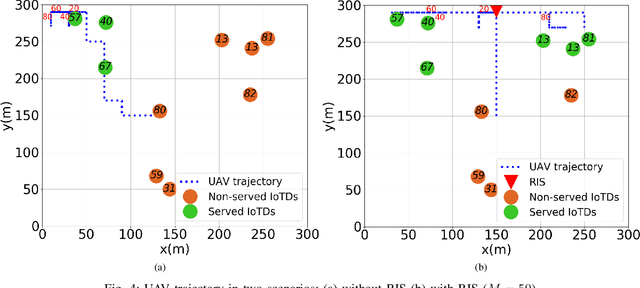
Smart city services are thriving thanks to a wide range of technological advances, namely 5G communications, Internet of Things (IoT), and artificial intelligence. Central to this is the wide deployment of smart sensing devices and accordingly the large amount of harvested information to be processed for timely decision making. Robust network access is, hence, essential for offloading the collected data before a set deadline, beyond which the data loses its value. In environments where direct communication can be impaired by blockages, unmanned aerial vehicles (UAVs) can be considered as an alternative for enhancing connectivity, particularly when IoT devices (IoTDs) are constrained with their resources. Moreover, to conserve energy, IoTDs are assumed to alternate between their active and passive modes. This paper, therefore, considers a time-constrained data gathering problem from a network of sensing devices and with assistance from a UAV. A reconfigurable intelligent surface (RIS) is deployed to further improve the connectivity to the UAV, particularly when the multiple devices are served concurrently and experience different channel impairments. This integrated problem brings challenges related to the configuration of the phase shift elements of the RIS, the scheduling of IoTDs transmissions, and the trajectory of the UAV. First, the problem is formulated with the objective of maximizing the total number of served IoTDs each during its activation period. Owing to its complexity and the incomplete knowledge about the environment, we leverage deep reinforcement learning in our solution; the UAV trajectory planning is modeled as a Markov Decision Process, and Proximal Policy Optimization is invoked to solve it. Next, the RIS configuration is then handled via Block Coordinate Descent. Finally, extensive simulations are conducted to demonstrate the efficiency of our solution approach.
Reconfigurable Intelligent Surface Enabled Vehicular Communication: Joint User Scheduling and Passive Beamforming
Jan 28, 2021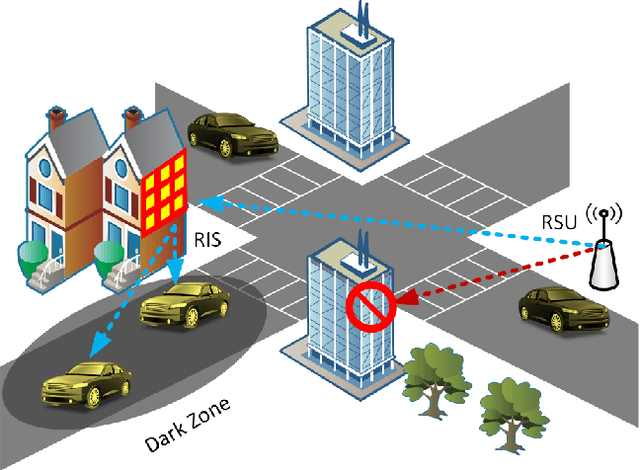
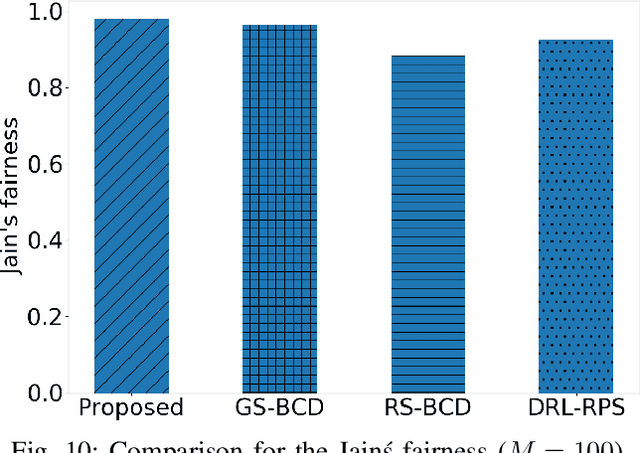
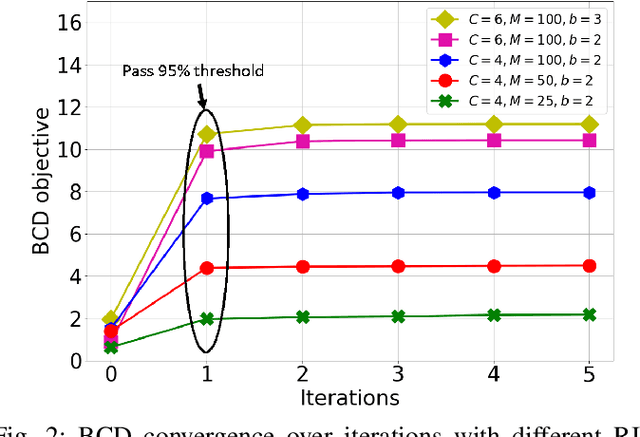
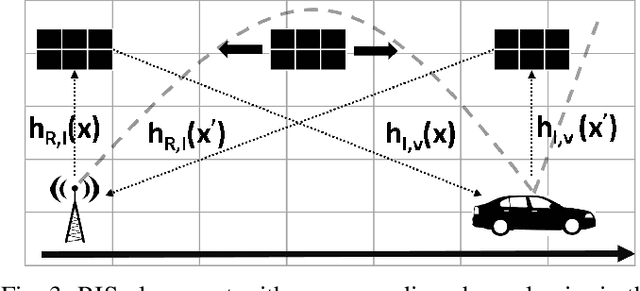
Given its ability to control and manipulate wireless environments, reconfigurable intelligent surface (RIS), also known as intelligent reflecting surface (IRS), has emerged as a key enabler technology for the six-generation (6G) cellular networks. In the meantime, vehicular environment radio propagation is negatively influenced by a large set of objects that cause transmission distortion such as high buildings. Therefore, this work is devoted to explore the area of RIS technology integration with vehicular communications while considering the dynamic nature of such communication environment. Specifically, we provide a system model where RoadSide Unit (RSU) leverages RIS to provide indirect wireless transmissions to disconnected areas, known as dark zones. Dark zones are spots within RSU coverage where the communication links are blocked due to the existence of blockages. In details, a discrete RIS is utilized to provide communication links between the RSU and the vehicles passing through out-of-service zones. Therefore, the joint problem of RSU resource scheduling and RIS passive beamforming or phase-shift matrix is formulated as an optimization problem with the objective of maximizing the minimum average bit rate. The formulated problem is mixed integer non-convex program which is difficult to be solved and does not account for the uncertain dynamic environment in vehicular networks. Thereby, we resort to alternative methods based on Deep Reinforcement Learning to determine RSU wireless scheduling and Block Coordinate Descent (BCD) to solve for the phase-shift matrix, \textit{i.e.,} passive beamforming, of the RIS. The Markov Decision Process (MDP) is defined and the complexity of the solution approach is discussed. Our numerical results demonstrate the superiority of our proposed approach over baseline techniques.