 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation-based Analysis Of Highway Trajectory Planning Using High-Order Polynomial For Highly Automated Driving Function
Mar 06, 2025



One of the fundamental tasks of autonomous driving is safe trajectory planning, the task of deciding where the vehicle needs to drive, while avoiding obstacles, obeying safety rules, and respecting the fundamental limits of road. Real-world application of such a method involves consideration of surrounding environment conditions and movements such as Lane Change, collision avoidance, and lane merge. The focus of the paper is to develop and implement safe collision free highway Lane Change trajectory using high order polynomial for Highly Automated Driving Function (HADF). Planning is often considered as a higher-level process than control. Behavior Planning Module (BPM) is designed that plans the high-level driving actions like Lane Change maneuver to safely achieve the functionality of transverse guidance ensuring safety of the vehicle using motion planning in a scenario including environmental situation. Based on the recommendation received from the (BPM), the function will generate a desire corresponding trajectory. The proposed planning system is situation specific with polynomial based algorithm for same direction two lane highway scenario. To support the trajectory system polynomial curve can be used to reduces overall complexity and thereby allows rapid computation. The proposed Lane Change scenario is modeled, and results has been analyzed (verified and validate) through the MATLAB simulation environment. The method proposed in this paper has achieved a significant improvement in safety and stability of Lane Changing maneuver.
Simulation-Based Performance Evaluation of 3D Object Detection Methods with Deep Learning for a LiDAR Point Cloud Dataset in a SOTIF-related Use Case
Mar 05, 2025Safety of the Intended Functionality (SOTIF) addresses sensor performance limitations and deep learning-based object detection insufficiencies to ensure the intended functionality of Automated Driving Systems (ADS). This paper presents a methodology examining the adaptability and performance evaluation of the 3D object detection methods on a LiDAR point cloud dataset generated by simulating a SOTIF-related Use Case. The major contributions of this paper include defining and modelling a SOTIF-related Use Case with 21 diverse weather conditions and generating a LiDAR point cloud dataset suitable for application of 3D object detection methods. The dataset consists of 547 frames, encompassing clear, cloudy, rainy weather conditions, corresponding to different times of the day, including noon, sunset, and night. Employing MMDetection3D and OpenPCDET toolkits, the performance of State-of-the-Art (SOTA) 3D object detection methods is evaluated and compared by testing the pre-trained Deep Learning (DL) models on the generated dataset using Average Precision (AP) and Recall metrics.
A Systematic Literature Review on Safety of the Intended Functionality for Automated Driving Systems
Mar 04, 2025

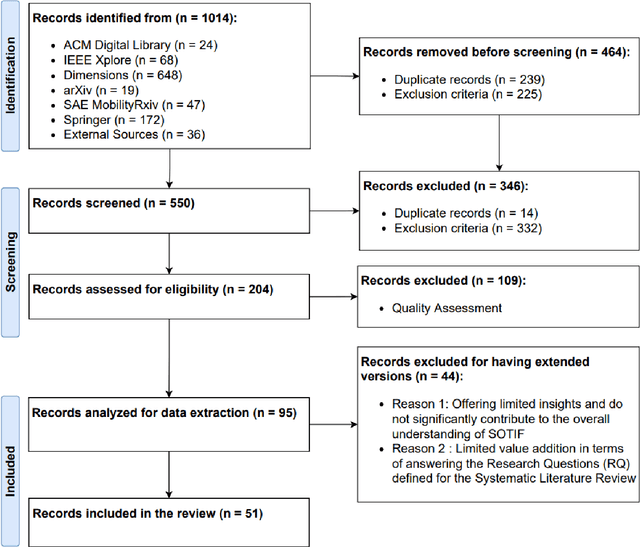

In the automobile industry, ensuring the safety of automated vehicles equipped with the Automated Driving System (ADS) is becoming a significant focus due to the increasing development and deployment of automated driving. Automated driving depends on sensing both the external and internal environments of a vehicle, utilizing perception sensors and algorithms, and Electrical/Electronic (E/E) systems for situational awareness and response. ISO 21448 is the standard for Safety of the Intended Functionality (SOTIF) that aims to ensure that the ADS operate safely within their intended functionality. SOTIF focuses on preventing or mitigating potential hazards that may arise from the limitations or failures of the ADS, including hazards due to insufficiencies of specification, or performance insufficiencies, as well as foreseeable misuse of the intended functionality. However, the challenge lies in ensuring the safety of vehicles despite the limited availability of extensive and systematic literature on SOTIF. To address this challenge, a Systematic Literature Review (SLR) on SOTIF for the ADS is performed following the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines. The objective is to methodically gather and analyze the existing literature on SOTIF. The major contributions of this paper are: (i) presenting a summary of the literature by synthesizing and organizing the collective findings, methodologies, and insights into distinct thematic groups, and (ii) summarizing and categorizing the acknowledged limitations based on data extracted from an SLR of 51 research papers published between 2018 and 2023. Furthermore, research gaps are determined, and future research directions are proposed.
Uncertainty Representation in a SOTIF-Related Use Case with Dempster-Shafer Theory for LiDAR Sensor-Based Object Detection
Mar 03, 2025Uncertainty in LiDAR sensor-based object detection arises from environmental variability and sensor performance limitations. Representing these uncertainties is essential for ensuring the Safety of the Intended Functionality (SOTIF), which focuses on preventing hazards in automated driving scenarios. This paper presents a systematic approach to identifying, classifying, and representing uncertainties in LiDAR-based object detection within a SOTIF-related scenario. Dempster-Shafer Theory (DST) is employed to construct a Frame of Discernment (FoD) to represent detection outcomes. Conditional Basic Probability Assignments (BPAs) are applied based on dependencies among identified uncertainty sources. Yager's Rule of Combination is used to resolve conflicting evidence from multiple sources, providing a structured framework to evaluate uncertainties' effects on detection accuracy. The study applies variance-based sensitivity analysis (VBSA) to quantify and prioritize uncertainties, detailing their specific impact on detection performance.