 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReceding Horizon Navigation and Target Tracking for Aerial Detection of Transient Radioactivity
Jun 04, 2022
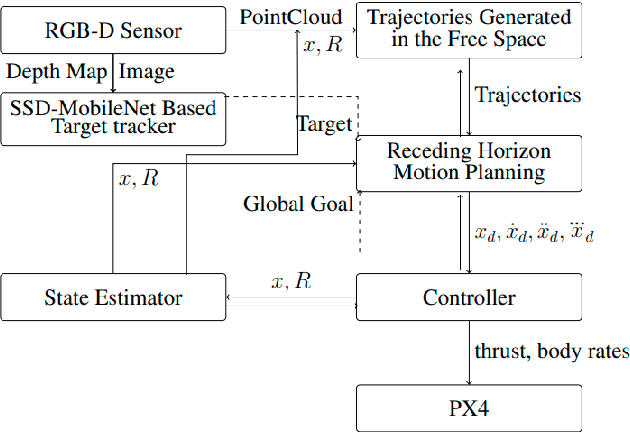
The paper presents a receding horizon planning and control strategy for quadrotor-type \ac{mav}s to navigate reactively and intercept a moving target in a cluttered unknown and dynamic environment. Leveraging a lightweight short-range sensor that generates a point-cloud within a relatively narrow and short \ac{fov}, and an \acs{ssd}-MobileNet based Deep neural network running on board the \ac{mav}, the proposed motion planning and control strategy produces safe and dynamically feasible \ac{mav} trajectories within the sensor \acs{fov}, which the vehicle uses to autonomously navigate, pursue, and intercept its moving target. This task is completed without reliance on a global planner or prior information about the environment or the moving target. The effectiveness of the reported planner is demonstrated numerically and experimentally in cluttered indoor and outdoor environments featuring maximum speeds of up to 4.5-5~m/s.