 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Energy Consumption and Traversal Time of Ground Robots for Outdoor Navigation on Multiple Types of Terrain
Aug 30, 2023The outdoor navigation capabilities of ground robots have improved significantly in recent years, opening up new potential applications in a variety of settings. Cost-based representations of the environment are frequently used in the path planning domain to obtain an optimized path based on various objectives, such as traversal time or energy consumption. However, obtaining such cost representations is still cumbersome, particularly in outdoor settings with diverse terrain types and slope angles. In this paper, we address this problem by using a data-driven approach to develop a cost representation for various outdoor terrain types that supports two optimization objectives, namely energy consumption and traversal time. We train a supervised machine learning model whose inputs consists of extracted environment data along a path and whose outputs are the predicted energy consumption and traversal time. The model is based on a ResNet neural network architecture and trained using field-recorded data. The error of the proposed method on different types of terrain is within 11\% of the ground truth data. To show that it performs and generalizes better than currently existing approaches on various types of terrain, a comparison to a baseline method is made.
Enabling and Assessing Trust when Cooperating with Robots in Disaster Response (EASIER)
Jul 08, 2022
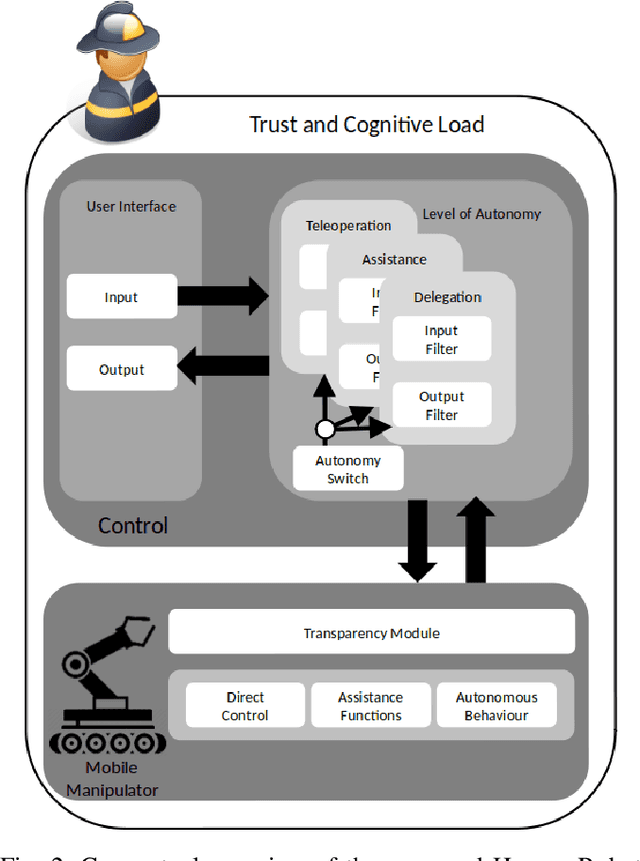
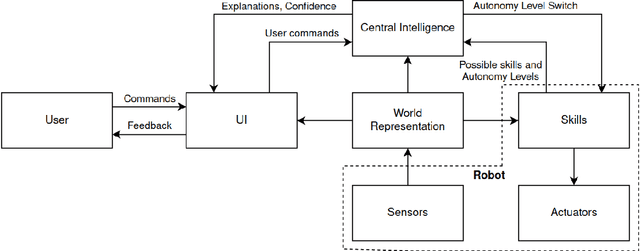
This paper presents a conceptual overview of the EASIER project and its scope. EASIER focuses on supporting emergency forces in disaster response scenarios with a semi-autonomous mobile manipulator. Specifically, we examine the operator's trust in the system and his/her cognitive load generated by its use. We plan to address different research topics, exploring how shared autonomy, interaction design, and transparency relate to trust and cognitive load. Another goal is to develop non-invasive methods to continuously measure trust and cognitive load in the context of disaster response using a multilevel approach. This project is conducted by multiple academic partners specializing in artificial intelligence, interaction design, and psychology, as well as an industrial partner for disaster response equipment and end-users for framing the project and the experiments in real use-cases.