 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Based Flow Matching for Generating 3D Molecular Structure
Aug 26, 2025Molecular structure generation is a fundamental problem that involves determining the 3D positions of molecules' constituents. It has crucial biological applications, such as molecular docking, protein folding, and molecular design. Recent advances in generative modeling, such as diffusion models and flow matching, have made great progress on these tasks by modeling molecular conformations as a distribution. In this work, we focus on flow matching and adopt an energy-based perspective to improve training and inference of structure generation models. Our view results in a mapping function, represented by a deep network, that is directly learned to \textit{iteratively} map random configurations, i.e. samples from the source distribution, to target structures, i.e. points in the data manifold. This yields a conceptually simple and empirically effective flow matching setup that is theoretically justified and has interesting connections to fundamental properties such as idempotency and stability, as well as the empirically useful techniques such as structure refinement in AlphaFold. Experiments on protein docking as well as protein backbone generation consistently demonstrate the method's effectiveness, where it outperforms recent baselines of task-associated flow matching and diffusion models, using a similar computational budget.
Verifying Safety of Behaviour Trees in Event-B
Sep 28, 2022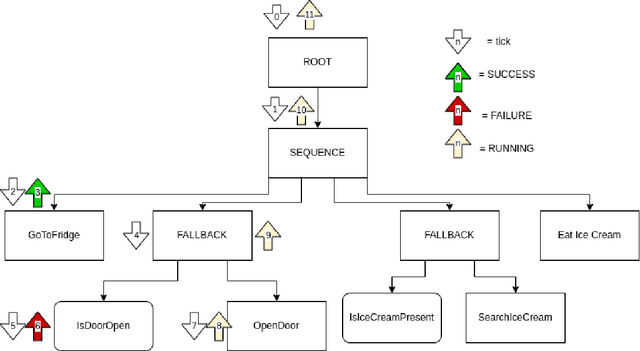
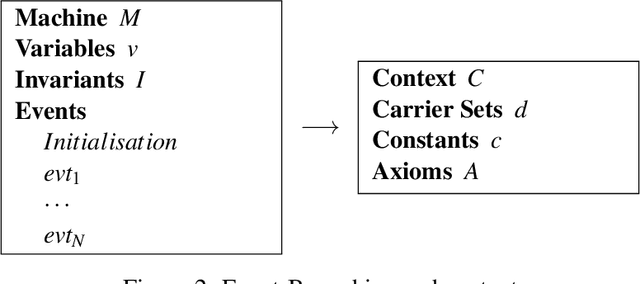


Behavior Trees (BT) are becoming increasingly popular in the robotics community. The BT tool is well suited for decision-making applications allowing a robot to perform complex behavior while being explainable to humans as well. Verifying that BTs used are well constructed with respect to safety and reliability requirements is essential, especially for robots operating in critical environments. In this work, we propose a formal specification of Behavior Trees and a methodology to prove invariants of already used trees, while keeping the complexity of the formalization of the tree simple for the final user. Allowing the possibility to test the particular instance of the behavior tree without the necessity to know the more abstract levels of the formalization.
* In Proceedings FMAS2022 ASYDE2022, arXiv:2209.13181