 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual-Level Models for Physics-Informed Multi-Step Time Series Forecasting
Jan 12, 2026This paper develops an approach for multi-step forecasting of dynamical systems by integrating probabilistic input forecasting with physics-informed output prediction. Accurate multi-step forecasting of time series systems is important for the automatic control and optimization of physical processes, enabling more precise decision-making. While mechanistic-based and data-driven machine learning (ML) approaches have been employed for time series forecasting, they face significant limitations. Incomplete knowledge of process mathematical models limits mechanistic-based direct employment, while purely data-driven ML models struggle with dynamic environments, leading to poor generalization. To address these limitations, this paper proposes a dual-level strategy for physics-informed forecasting of dynamical systems. On the first level, input variables are forecast using a hybrid method that integrates a long short-term memory (LSTM) network into probabilistic state transition models (STMs). On the second level, these stochastically predicted inputs are sequentially fed into a physics-informed neural network (PINN) to generate multi-step output predictions. The experimental results of the paper demonstrate that the hybrid input forecasting models achieve a higher log-likelihood and lower mean squared errors (MSE) compared to conventional STMs. Furthermore, the PINNs driven by the input forecasting models outperform their purely data-driven counterparts in terms of MSE and log-likelihood, exhibiting stronger generalization and forecasting performance across multiple test cases.
Optimal active particle navigation meets machine learning
Mar 09, 2023The question of how "smart" active agents, like insects, microorganisms, or future colloidal robots need to steer to optimally reach or discover a target, such as an odor source, food, or a cancer cell in a complex environment has recently attracted great interest. Here, we provide an overview of recent developments, regarding such optimal navigation problems, from the micro- to the macroscale, and give a perspective by discussing some of the challenges which are ahead of us. Besides exemplifying an elementary approach to optimal navigation problems, the article focuses on works utilizing machine learning-based methods. Such learning-based approaches can uncover highly efficient navigation strategies even for problems that involve e.g. chaotic, high-dimensional, or unknown environments and are hardly solvable based on conventional analytical or simulation methods.
Reinforcement learning of optimal active particle navigation
Feb 01, 2022



The development of self-propelled particles at the micro- and the nanoscale has sparked a huge potential for future applications in active matter physics, microsurgery, and targeted drug delivery. However, while the latter applications provoke the quest on how to optimally navigate towards a target, such as e.g. a cancer cell, there is still no simple way known to determine the optimal route in sufficiently complex environments. Here we develop a machine learning-based approach that allows us, for the first time, to determine the asymptotically optimal path of a self-propelled agent which can freely steer in complex environments. Our method hinges on policy gradient-based deep reinforcement learning techniques and, crucially, does not require any reward shaping or heuristics. The presented method provides a powerful alternative to current analytical methods to calculate optimal trajectories and opens a route towards a universal path planner for future intelligent active particles.
Time series model selection with a meta-learning approach; evidence from a pool of forecasting algorithms
Aug 22, 2019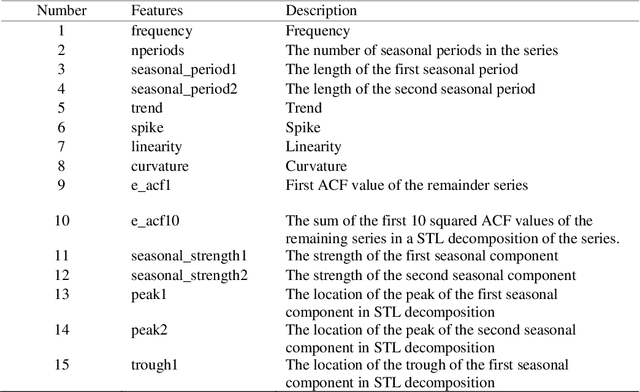
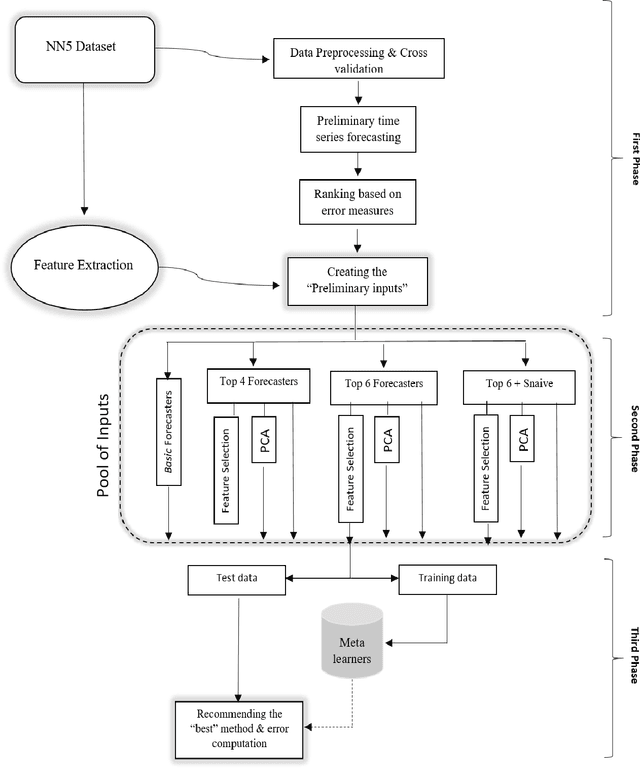
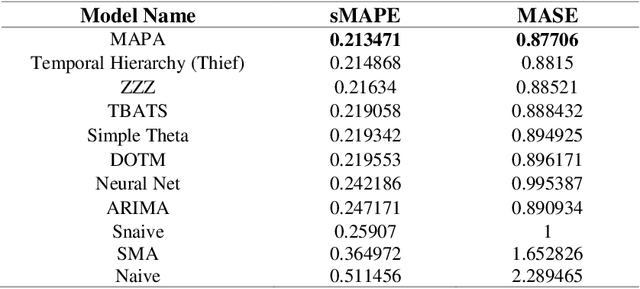
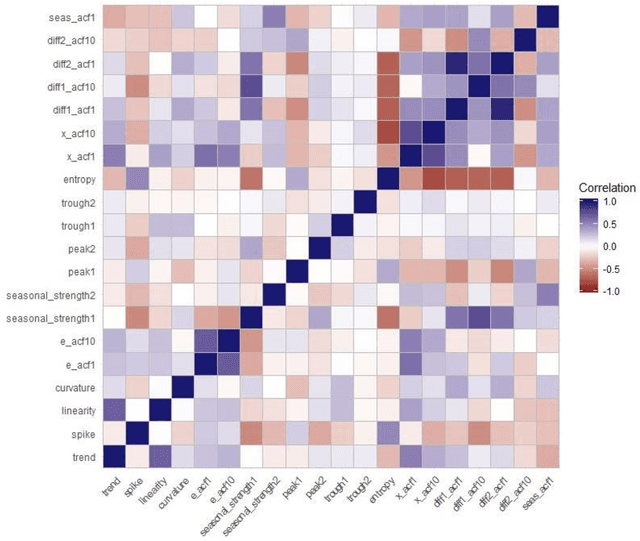
One of the challenging questions in time series forecasting is how to find the best algorithm. In recent years, a recommender system scheme has been developed for time series analysis using a meta-learning approach. This system selects the best forecasting method with consideration of the time series characteristics. In this paper, we propose a novel approach to focusing on some of the unanswered questions resulting from the use of meta-learning in time series forecasting. Therefore, three main gaps in previous works are addressed including, analyzing various subsets of top forecasters as inputs for meta-learners; evaluating the effect of forecasting error measures; and assessing the role of the dimensionality of the feature space on the forecasting errors of meta-learners. All of these objectives are achieved with the help of a diverse state-of-the-art pool of forecasters and meta-learners. For this purpose, first, a pool of forecasting algorithms is implemented on the NN5 competition dataset and ranked based on the two error measures. Then, six machine-learning classifiers known as meta-learners, are trained on the extracted features of the time series in order to assign the most suitable forecasting method for the various subsets of the pool of forecasters. Furthermore, two-dimensionality reduction methods are implemented in order to investigate the role of feature space dimension on the performance of meta-learners. In general, it was found that meta-learners were able to defeat all of the individual benchmark forecasters; this performance was improved even after applying the feature selection method.