 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe development of a portable elbow exoskeleton with a Twisted Strings Actuator to assist patients with upper limb inhabitation
Jan 25, 2022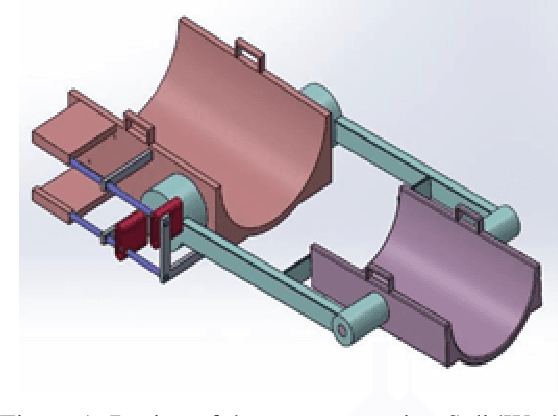



Over the years, the number of exoskeleton devices utilized for upper-limb rehabilitation has increased dramatically, each with its own set of pros and cons. Most exoskeletons are not portable, limiting their utility to daily use for house patients. Additionally, the huge size of some grounded exoskeletons consumes space while maintaining a sophisticated structure and require more expensive materials. In other words, to maintain affordability, the device's structure must be simple. Thus, in this work, a portable elbow exoskeleton is developed using SolidWorks to incorporate a Twisted Strings Actuator (TSA) to aid in upper-limb rehabilitation and to provide an alternative for those with compromised limbs to recuperate. Experiments are conducted to identify the optimal value for building a more flexible elbow exoskeleton prototype by analyzing stress, strain conditions, torque, forces, and strings. Preliminary computational findings reveal that for the proposed intended prototype, a string length of.033 m and a torque value ranging from 1.5 Nm to 3 Nm are optimal.