 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMRI-compatible electromagnetic servomotors for image-guided robotic procedures
Aug 16, 2021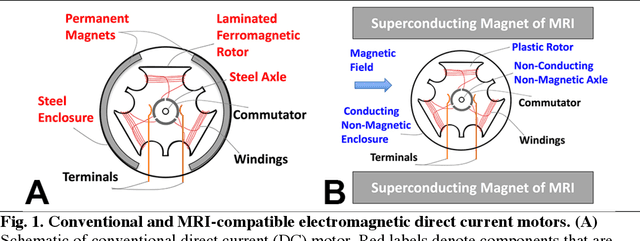
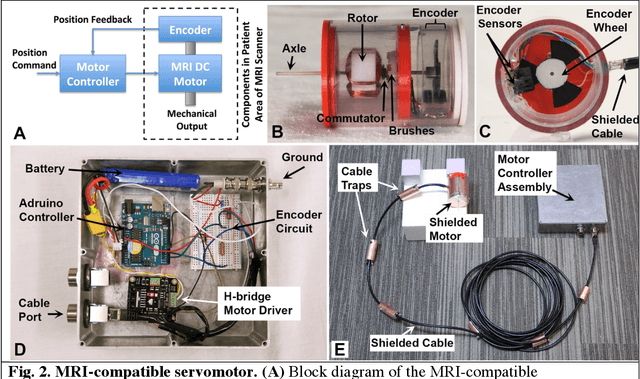
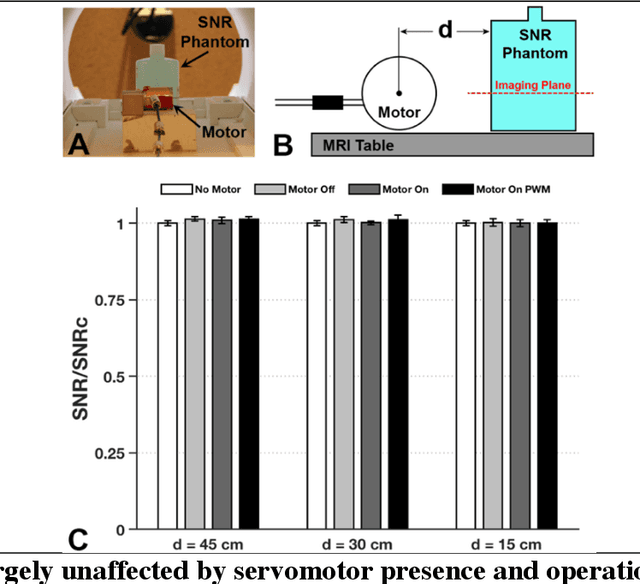
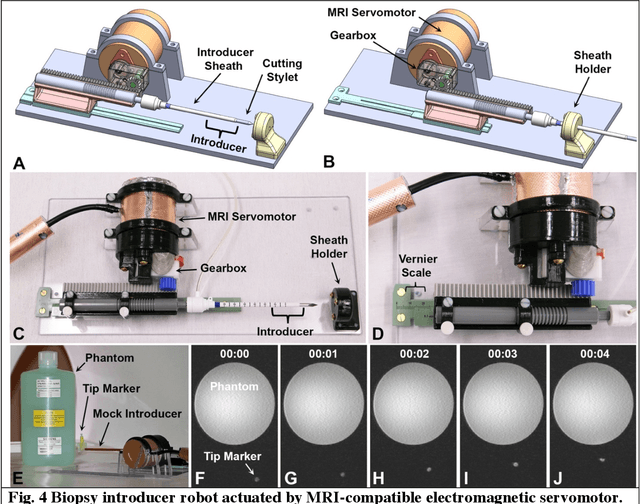
Combining the unmatched soft-tissue imaging capabilities of magnetic resonance imaging (MRI) with high precision robotics has the potential to improve the accuracy, precision, and safety of a wide range of image-guided medical procedures. However, the goal of highly functional MRI-compatible robotic systems has not yet been realized because conventional electromagnetic servomotors used by medical robots can become dangerous projectiles near the strong magnetic field of an MRI scanner. Here we report a novel electromagnetic servomotor design that is constructed from non-magnetic components and can operate within the patient area of clinical scanners. We show that this design enables high-torque and precisely controlled rotary actuation during imaging. Using this servomotor design, an MRI-compatible robot was constructed and tested. The robot demonstrated that the linear forces required to manipulate large diameter surgical instruments in tissues could be achieved during simultaneous imaging with MRI. This work presents the first fully functional electromagnetic servomotor that can be safely operated (while imaging) in the patient area of a 3 Tesla clinical MRI scanner.