 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Review on Communication Protocols for Autonomous Unmanned Aerial Vehicles for Inspection Application
Nov 12, 2021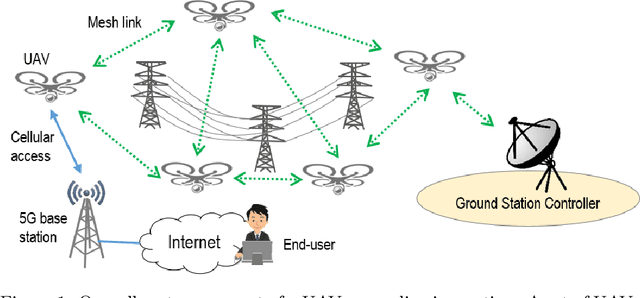
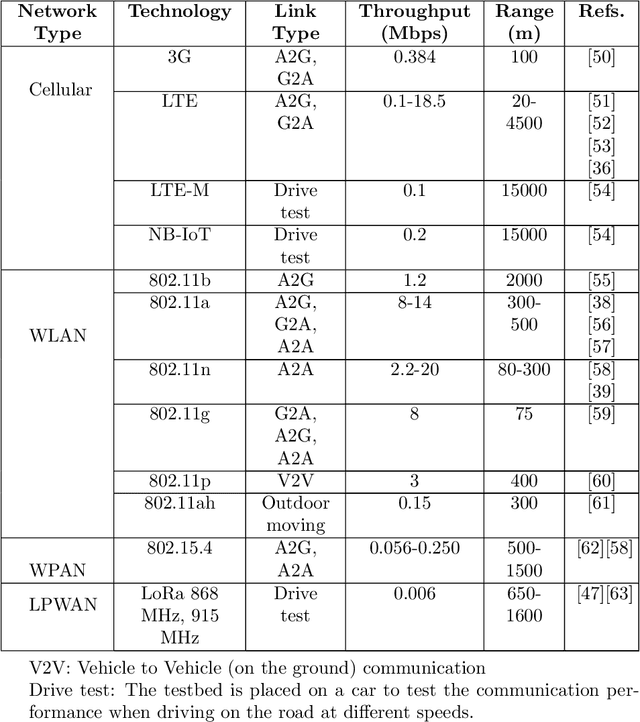
The communication system is a critical part of the system design for the autonomous UAV. It has to address different considerations, including efficiency, reliability and mobility of the UAV. In addition, a multi-UAV system requires a communication system to assist information sharing, task allocation and collaboration in a team of UAVs. In this paper, we review communication solutions for supporting a team of UAVs while considering an application in the power line inspection industry. We provide a review of candidate wireless communication technologies {for supporting communication in UAV applications. Performance measurements and UAV-related channel modeling of those candidate technologies are reviewed. A discussion of current technologies for building UAV mesh networks is presented. We then analyze the structure, interface and performance of robotic communication middleware, ROS and ROS2. Based on our review, the features and dependencies of candidate solutions in each layer of the communication system are presented.