 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring SAM Supervision for Fine-Grained UAV Target Segmentation under Data Scarcity
Jul 04, 2026Unmanned aerial vehicle (UAV) target segmentation remains challenging due to the small size of objects, appearance variations, cluttered backgrounds, and the scarcity of densely annotated data. These factors hinder the performance and practical deployment of lightweight segmentation models in real-world UAV applications. To address this problem, this paper investigates the use of SAM3 (Segment Anything Model 3) as a pseudo-label generator for training compact segmentation networks. Specifically, two supervision paradigms are explored: (i) direct pseudo-supervision using unaltered SAM3-generated masks, and (ii) a refinement strategy that re-applies SAM3 to localized image patches for improved mask quality. Based on these paradigms, a two-stage SAM3-guided pseudo-label generation framework is proposed. In the first stage, SAM3 generates coarse masks for initial object localization. The localized regions are subsequently cropped into patches and processed by SAM3 again to generate fine masks with accurate object boundaries and discard false positives. The resulting coarse and fine masks are then used as pseudo-labels to optimize a lightweight network, termed IPS-Seg, which consists of three components: an IdentityFormer backbone for feature extraction, an Atrous Spatial Pyramid Pooling module for multi-scale context aggregation, and a PixelShuffle-based decoder for spatial resolution recovery. Extensive experiments under multiple supervision settings demonstrate the effectiveness of the proposed framework. The results show that IPS-Seg achieves a favorable trade-off between segmentation accuracy and computational efficiency while benefiting consistently from the proposed pseudo-label generation strategy. These findings highlight the potential of large-scale foundation models as annotation sources for training compact task-specific segmentation networks in low-label vision domains.
MetaFormer-driven Encoding Network for Robust Medical Semantic Segmentation
Jan 01, 2026Semantic segmentation is crucial for medical image analysis, enabling precise disease diagnosis and treatment planning. However, many advanced models employ complex architectures, limiting their use in resource-constrained clinical settings. This paper proposes MFEnNet, an efficient medical image segmentation framework that incorporates MetaFormer in the encoding phase of the U-Net backbone. MetaFormer, an architectural abstraction of vision transformers, provides a versatile alternative to convolutional neural networks by transforming tokenized image patches into sequences for global context modeling. To mitigate the substantial computational cost associated with self-attention, the proposed framework replaces conventional transformer modules with pooling transformer blocks, thereby achieving effective global feature aggregation at reduced complexity. In addition, Swish activation is used to achieve smoother gradients and faster convergence, while spatial pyramid pooling is incorporated at the bottleneck to improve multi-scale feature extraction. Comprehensive experiments on different medical segmentation benchmarks demonstrate that the proposed MFEnNet approach attains competitive accuracy while significantly lowering computational cost compared to state-of-the-art models. The source code for this work is available at https://github.com/tranleanh/mfennet.
Unpaired Image Dehazing via Kolmogorov-Arnold Transformation of Latent Features
Feb 08, 2025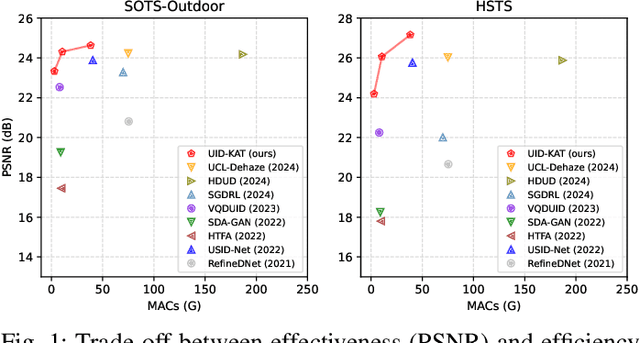
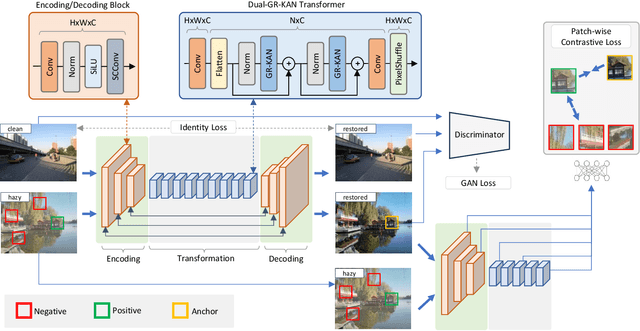
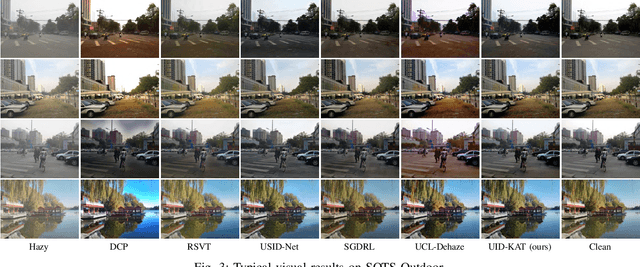
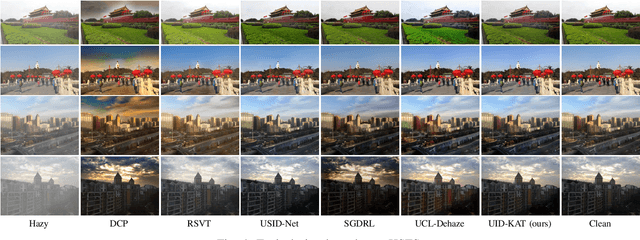
This paper proposes an innovative framework for Unsupervised Image Dehazing via Kolmogorov-Arnold Transformation, termed UID-KAT. Image dehazing is recognized as a challenging and ill-posed vision task that requires complex transformations and interpretations in the feature space. Recent advancements have introduced Kolmogorov-Arnold Networks (KANs), inspired by the Kolmogorov-Arnold representation theorem, as promising alternatives to Multi-Layer Perceptrons (MLPs) since KANs can leverage their polynomial foundation to more efficiently approximate complex functions while requiring fewer layers than MLPs. Motivated by this potential, this paper explores the use of KANs combined with adversarial training and contrastive learning to model the intricate relationship between hazy and clear images. Adversarial training is employed due to its capacity in producing high-fidelity images, and contrastive learning promotes the model's emphasis on significant features while suppressing the influence of irrelevant information. The proposed UID-KAT framework is trained in an unsupervised setting to take advantage of the abundance of real-world data and address the challenge of preparing paired hazy/clean images. Experimental results show that UID-KAT achieves state-of-the-art dehazing performance across multiple datasets and scenarios, outperforming existing unpaired methods while reducing model complexity. The source code for this work is publicly available at https://github.com/tranleanh/uid-kat.
Distilled Pooling Transformer Encoder for Efficient Realistic Image Dehazing
Dec 18, 2024This paper proposes a lightweight neural network designed for realistic image dehazing, utilizing a Distilled Pooling Transformer Encoder, named DPTE-Net. Recently, while vision transformers (ViTs) have achieved great success in various vision tasks, their self-attention (SA) module's complexity scales quadratically with image resolution, hindering their applicability on resource-constrained devices. To overcome this, the proposed DPTE-Net substitutes traditional SA modules with efficient pooling mechanisms, significantly reducing computational demands while preserving ViTs' learning capabilities. To further enhance semantic feature learning, a distillation-based training process is implemented which transfers rich knowledge from a larger teacher network to DPTE-Net. Additionally, DPTE-Net is trained within a generative adversarial network (GAN) framework, leveraging the strong generalization of GAN in image restoration, and employs a transmission-aware loss function to dynamically adapt to varying haze densities. Experimental results on various benchmark datasets have shown that the proposed DPTE-Net can achieve competitive dehazing performance when compared to state-of-the-art methods while maintaining low computational complexity, making it a promising solution for resource-limited applications. The code of this work is available at https://github.com/tranleanh/dpte-net.
Encoder-Decoder Network with Guided Transmission Map: Architecture -- Extended Abstract
Dec 07, 2022An insight into the architecture of the Encoder-Decoder Network with Guided Transmission Map (EDN-GTM), a novel and effective single image dehazing scheme, is presented in this paper. The EDN-GTM takes a conventional RGB hazy image in conjunction with the corresponding transmission map estimated by the dark channel prior (DCP) approach as inputs of the network. The EDN-GTM adopts an enhanced structure of U-Net developed for dehazing tasks and the resulting EDN-GDM has shown state-of-the-art performances on benchmark dehazing datasets in terms of PSNR and SSIM metrics. In order to give an in-depth understanding of the well-designed architecture which largely contributes to the success of the EDN-GTM, extensive experiments and analysis from selecting the core structure of the scheme to investigating advanced network designs are presented in this paper.
POCS-based Clustering Algorithm
Aug 15, 2022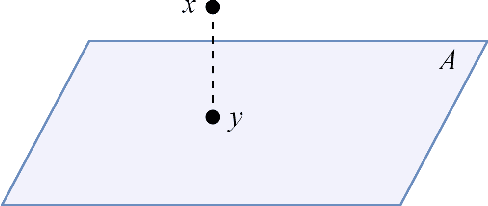

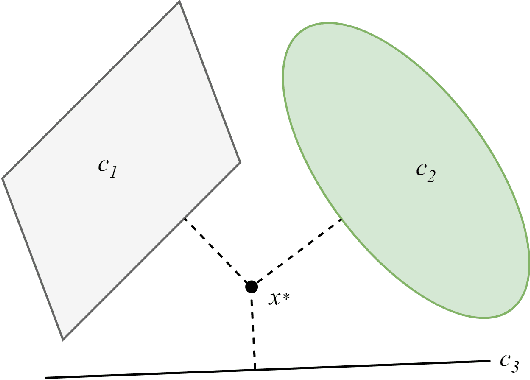

A novel clustering technique based on the projection onto convex set (POCS) method, called POCS-based clustering algorithm, is proposed in this paper. The proposed POCS-based clustering algorithm exploits a parallel projection method of POCS to find appropriate cluster prototypes in the feature space. The algorithm considers each data point as a convex set and projects the cluster prototypes parallelly to the member data points. The projections are convexly combined to minimize the objective function for data clustering purpose. The performance of the proposed POCS-based clustering algorithm is verified through experiments on various synthetic datasets. The experimental results show that the proposed POCS-based clustering algorithm is competitive and efficient in terms of clustering error and execution speed when compared with other conventional clustering methods including Fuzzy C-Means (FCM) and K-means clustering algorithms.
A Novel Encoder-Decoder Network with Guided Transmission Map for Single Image Dehazing
Feb 08, 2022A novel Encoder-Decoder Network with Guided Transmission Map (EDN-GTM) for single image dehazing scheme is proposed in this paper. The proposed EDN-GTM takes conventional RGB hazy image in conjunction with its transmission map estimated by adopting dark channel prior as the inputs of the network. The proposed EDN-GTM utilizes U-Net for image segmentation as the core network and utilizes various modifications including spatial pyramid pooling module and Swish activation to achieve state-of-the-art dehazing performance. Experiments on benchmark datasets show that the proposed EDN-GTM outperforms most of traditional and deep learning-based image dehazing schemes in terms of PSNR and SSIM metrics. The proposed EDN-GTM furthermore proves its applicability to object detection problems. Specifically, when applied to an image preprocessing tool for driving object detection, the proposed EDN-GTM can efficiently remove haze and significantly improve detection accuracy by 4.73% in terms of mAP measure. The code is available at: https://github.com/tranleanh/edn-gtm.
Robustness Enhancement of Object Detection in Advanced Driver Assistance Systems (ADAS)
May 04, 2021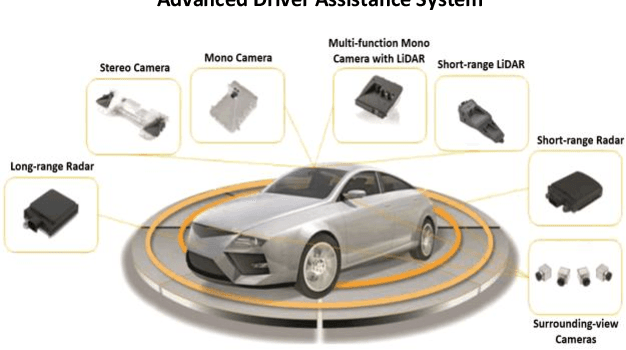

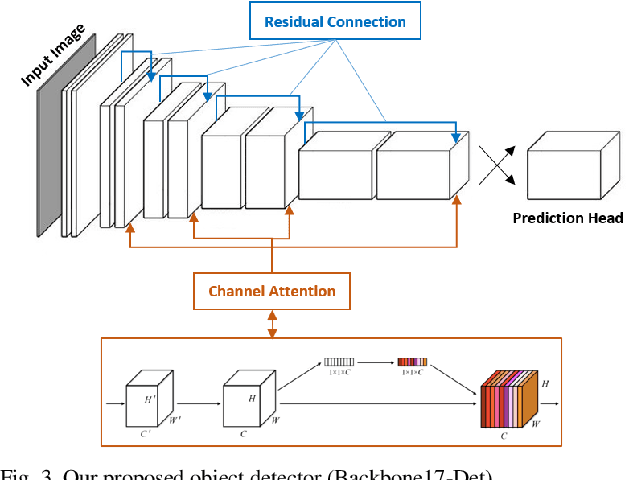
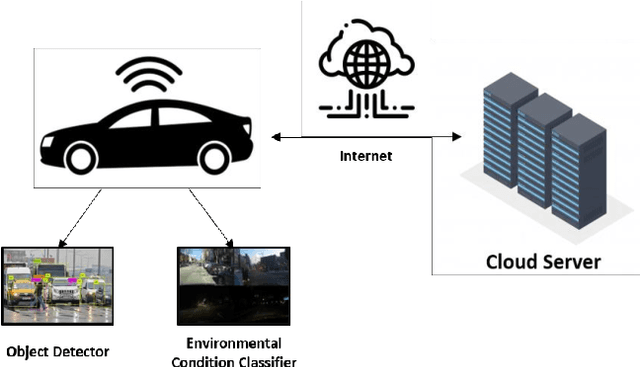
A unified system integrating a compact object detector and a surrounding environmental condition classifier for enhancing the robustness of object detection scheme in advanced driver assistance systems (ADAS) is proposed in this paper. ADAS are invented to improve traffic safety and effectiveness in autonomous driving systems where object detection plays an extremely important role. However, modern object detectors integrated in ADAS are still unstable due to high latency and the variation of the environmental contexts in the deployment phase. Our system is proposed to address the aforementioned problems. The proposed system includes two main components: (1) a compact one-stage object detector which is expected to be able to perform at a comparable accuracy compared to state-of-the-art object detectors, and (2) an environmental condition detector that helps to send a warning signal to the cloud in case the self-driving car needs human actions due to the significance of the situation. The empirical results prove the reliability and the scalability of the proposed system to realistic scenarios.