 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection of E-scooter Riders in Naturalistic Scenes
Nov 28, 2021
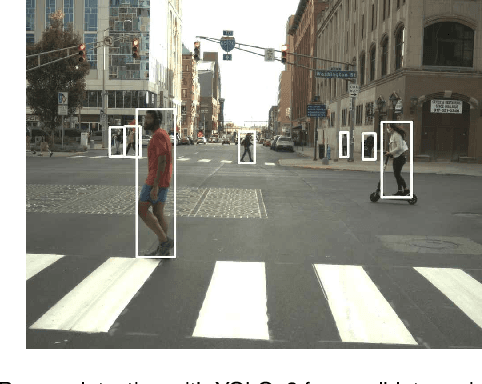
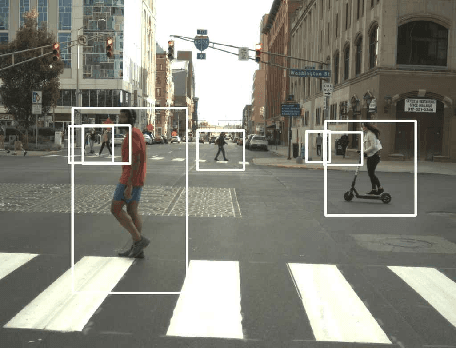
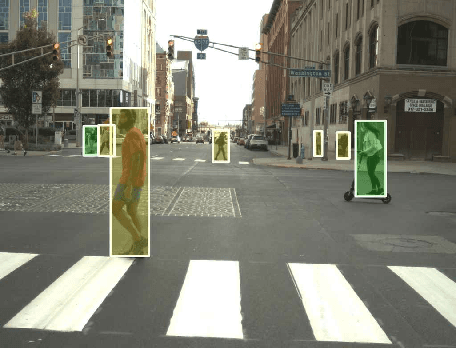
E-scooters have become ubiquitous vehicles in major cities around the world.The numbers of e-scooters keep escalating, increasing their interactions with other cars on the road. Normal behavior of an e-scooter rider varies enormously to other vulnerable road users. This situation creates new challenges for vehicle active safety systems and automated driving functionalities, which require the detection of e-scooter riders as the first step. To our best knowledge, there is no existing computer vision model to detect these e-scooter riders. This paper presents a novel vision-based system to differentiate between e-scooter riders and regular pedestrians and a benchmark data set for e-scooter riders in natural scenes. We propose an efficient pipeline built over two existing state-of-the-art convolutional neural networks (CNN), You Only Look Once (YOLOv3) and MobileNetV2. We fine-tune MobileNetV2 over our dataset and train the model to classify e-scooter riders and pedestrians. We obtain a recall of around 0.75 on our raw test sample to classify e-scooter riders with the whole pipeline. Moreover, the classification accuracy of trained MobileNetV2 on top of YOLOv3 is over 91%, with precision and recall over 0.9.