 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocalization with Noisy Android Raw GNSS Measurements
Sep 28, 2023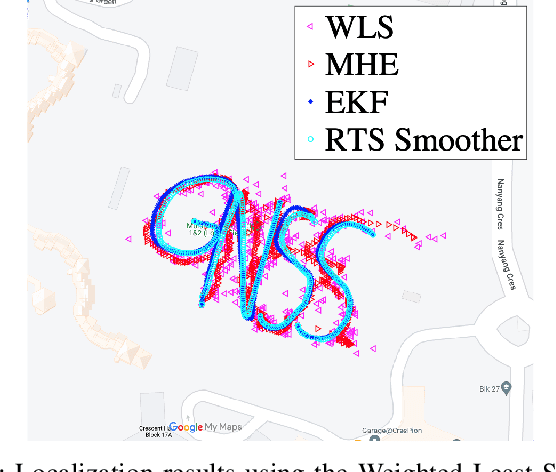



Android raw Global Navigation Satellite System (GNSS) measurements are expected to bring smartphones power to take on demanding localization tasks that are traditionally performed by specialized GNSS receivers. The hardware constraints, however, make Android raw GNSS measurements much noisier than geodetic-quality ones. This study elucidates the principles of localization using Android raw GNSS measurements and leverages Moving Horizon Estimation (MHE), Extended Kalman Filter (EKF), and Rauch-Tung-Striebel (RTS) smoother for noise suppression. Experimental results show that the RTS smoother achieves the best positioning performance, with horizontal positioning errors significantly reduced by 76.4% and 46.5% in static and dynamic scenarios compared with the baseline weighted least squares (WLS) method. Our codes are available at https://github.com/ailocar/androidGnss.
PrNet: A Neural Network for Correcting Pseudoranges to Improve Positioning with Android Raw GNSS Measurements
Sep 16, 2023


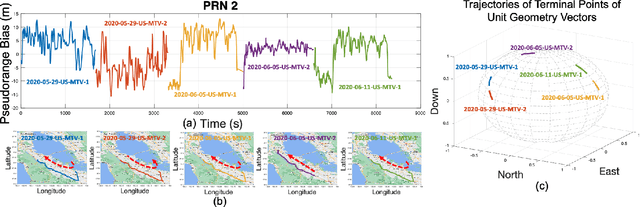
We present a neural network for mitigating pseudorange bias to improve localization performance with data collected from Android smartphones. We represent pseudorange bias using a pragmatic satellite-wise Multiple Layer Perceptron (MLP), the inputs of which are six satellite-receiver-context-related features derived from Android raw Global Navigation Satellite System (GNSS) measurements. To supervise the training process, we carefully calculate the target values of pseudorange bias using location ground truth and smoothing techniques and optimize a loss function containing the estimation residuals of smartphone clock bias. During the inference process, we employ model-based localization engines to compute locations with pseudoranges corrected by the neural network. Consequently, this hybrid pipeline can attend to both pseudorange bias and noise. We evaluate the framework on an open dataset and consider four application scenarios for investigating fingerprinting and cross-trace localization in rural and urban areas. Extensive experiments demonstrate that the proposed framework outperforms model-based and state-of-the-art data-driven approaches.