 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Stage Fine-Tuning of Pathology Foundation Models with Head-Diverse Ensembling for White Blood Cell Classification
Mar 20, 2026The classification of white blood cells (WBCs) from peripheral blood smears is critical for the diagnosis of leukemia. However, automated approaches still struggle due to challenges including class imbalance, domain shift, and morphological continuum confusion, where adjacent maturation stages exhibit subtle, overlapping features. We present a multi-stage fine-tuning methodology for 13-class WBC classification in the WBCBench 2026 Challenge (ISBI 2026). Our best-performing model is a fine-tuned DINOBloom-base, on which we train multiple classifier head families (linear, cosine, and multilayer perceptron (MLP)). The cosine head performed best on the mature granulocyte boundary (Band neutrophil (BNE) F1 = 0.470), the linear head on more immature granulocyte classes (Metamyelocyte (MMY) F1 = 0.585), and the MLP head on the most immature granulocyte (Promyelocyte (PMY) F1 = 0.733), revealing class-specific specialization. Based on this specialization, we construct a head-diverse ensemble, where the MLP head acts as the primary predictor, and its predictions within the four predefined confusion pairs are replaced only when two other head families agree. We further show that cases consistently misclassified by all models are substantially enriched for probable labeling errors or inherent morphological ambiguity.
Inverting the sound speed profile from multi-beam echo sounder data and historical measurements -- a simulation study
Sep 03, 2024
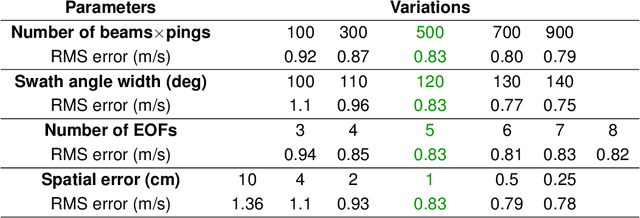
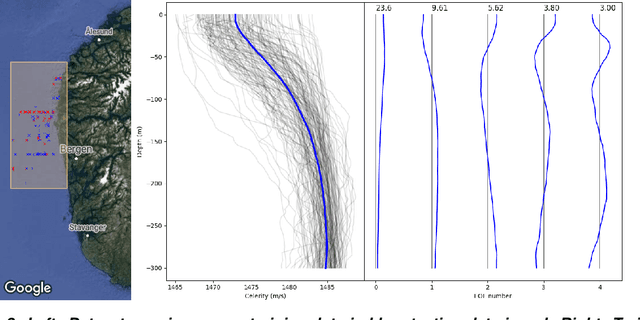
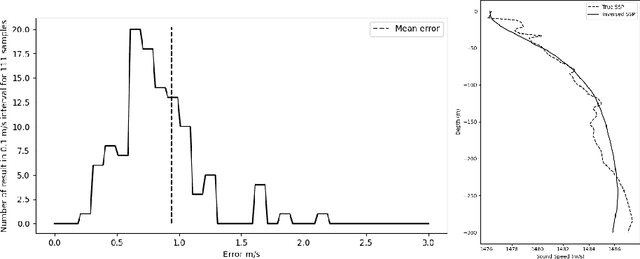
The ocean's opacity poses challenges for security, as new technology, e.g. underwater drones, offers new opportunities for illegal activities, such as smuggling and terrorism. A network of unmanned surface vehicles (USV) and autonomous underwater vehicles (AUV) offers a potential underwater surveillance solution, but demands high autonomy and compact hardware. For improved situational awareness and efficient operation, sonar performance models may provide the network with sensor coverage maps, but this requires constantly updated environmental information, in particular the present sound speed profile (SSP). We propose the inversion of SSPs from multibeam echo sounder (MBES) data in an environment with known topography. The method exploits the two-way travel time from the MBES to the bottom, comparing the measurements to modelled travel time for a proposed SSP model. An acoustic raytracer models the travel time for the SSP model. The inversion problem is shown to be non-unique when basing the cost function on the two-way travel time alone. This is resolved by incorporating a Tikhonov-type regularization term for inclusion of a priori knowledge on the SSPs in addition to the travel time in the final cost function. Empirical orthogonal functions (EOFs) are derived from a historical SSP data set, and variance for the EOF coefficients are determined from the same data set. The EOF coefficient distributions are assumed Gaussian and used in the regularization term to limit the search space of the inversion algorithm to physically feasible SSPs. A neural network determines the regularization parameters. The method's validity and sensitivity to errors is assessed using synthetic sonar data for the Norwegian Trench. The method accurately recovers SSPs with average root mean square errors of 0.83 m/s. For comparison, the error obtained using state-of-the-art climatology (WOA) is 2.6 m/s.
* 8 pages, 3 figures