 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Forward Kinematics of a 3SPR Parallel Manipulator
May 31, 2022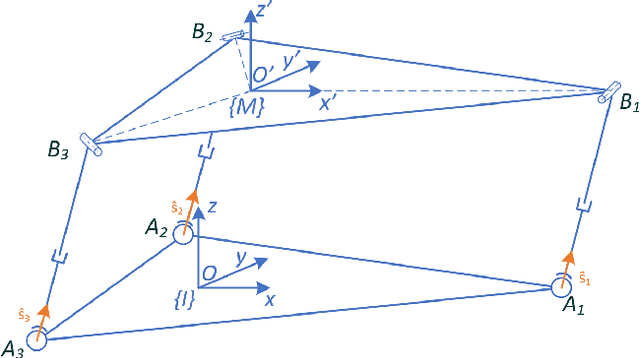



In this paper, a new numerical method to solve the forward kinematics (FK) of a parallel manipulator with three-limb spherical-prismatic-revolute (3SPR) structure is presented. Unlike the existing numerical approaches that rely on computation of the manipulator's Jacobian matrix and its inverse at each iteration, the proposed algorithm requires much less computations to estimate the FK parameters. A cost function is introduced that measures the difference of the estimates from the actual FK values. At each iteration, the problem is decomposed into two steps. First, the estimates of the platform orientation from the heave estimates are obtained. Then, heave estimates are updated by moving in the gradient direction of the proposed cost function. To validate the performance of the proposed algorithm, it is compared against a Jacobian-based (JB) approach for a 3SPR parallel manipulator.