 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconstructing normal section profiles of 3D revolving structures via pose-unconstrained multi-line structured-light vision
Apr 27, 2020

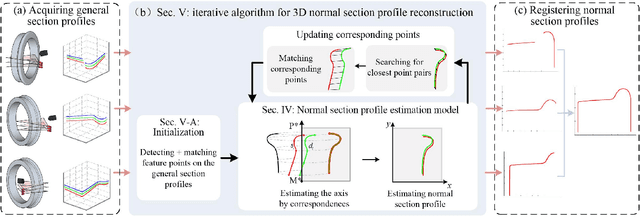
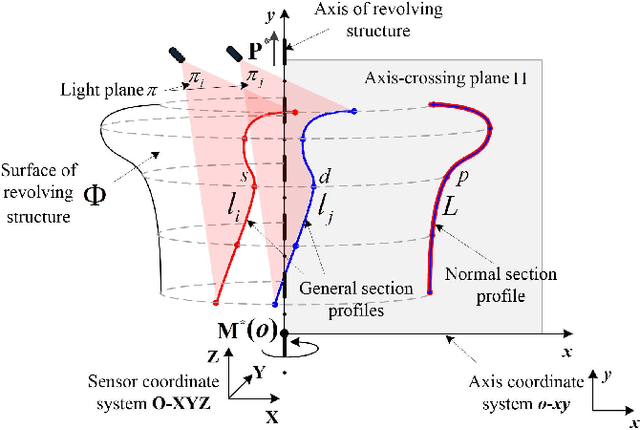
The wheel of the train is a 3D revolving geometrical structure. Reconstructing the normal section profile is an effective approach to determine the critical geometric parameter and wear of the wheel in the community of railway safety. The existing reconstruction methods typically require a sensor working in a constrained position and pose, suffering poor flexibility and limited viewangle. This paper proposes a pose-unconstrained normal section profile reconstruction framework for 3D revolving structures via multiple 3D general section profiles acquired by a multi-line structured light vision sensor. First, we establish a model to estimate the axis of 3D revolving geometrical structure and the normal section profile using corresponding points. Then, we embed the model into an iterative algorithm to optimize the corresponding points and finally reconstruct the accurate normal section profile. We conducted real experiment on reconstructing the normal section profile of a 3D wheel. The results demonstrate that our algorithm reaches the mean precision of 0.068mm and good repeatability with the STD of 0.007mm. It is also robust to varying pose variations of the sensor. Our proposed framework and models are generalized to any 3D wheeltype revolving components.