 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeasuring Object Rotation via Visuo-Tactile Segmentation
Jan 18, 2024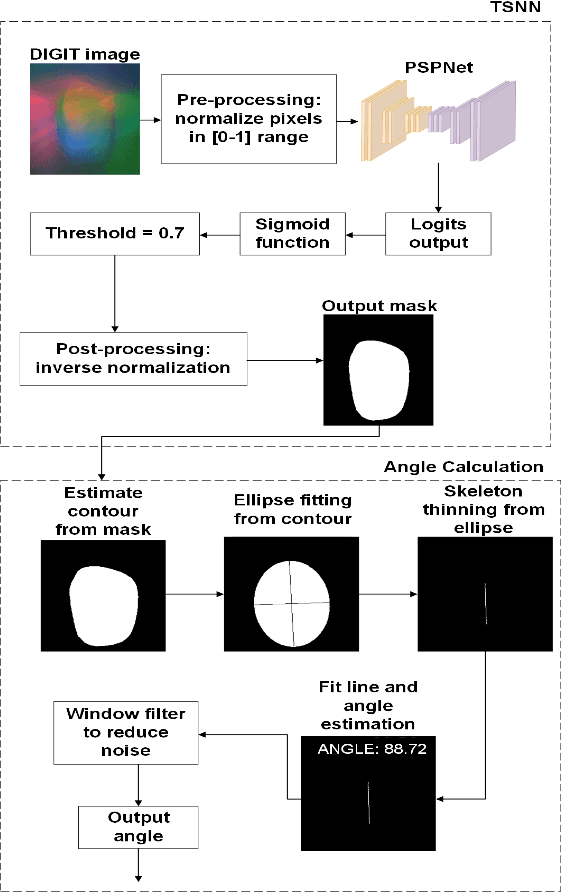
When carrying out robotic manipulation tasks, objects occasionally fall as a result of the rotation caused by slippage. This can be prevented by obtaining tactile information that provides better knowledge on the physical properties of the grasping. In this paper, we estimate the rotation angle of a grasped object when slippage occurs. We implement a system made up of a neural network with which to segment the contact region and an algorithm with which to estimate the rotated angle of that region. This method is applied to DIGIT tactile sensors. Our system has additionally been trained and tested with our publicly available dataset which is, to the best of our knowledge, the first dataset related to tactile segmentation from non-synthetic images to appear in the literature, and with which we have attained results of 95% and 90% as regards Dice and IoU metrics in the worst scenario. Moreover, we have obtained a maximum error of 3 degrees when testing with objects not previously seen by our system in 45 different lifts. This, therefore, proved that our approach is able to detect the slippage movement, thus providing a possible reaction that will prevent the object from falling.