 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCraterGrader: Autonomous Robotic Terrain Manipulation for Lunar Site Preparation and Earthmoving
Nov 03, 2023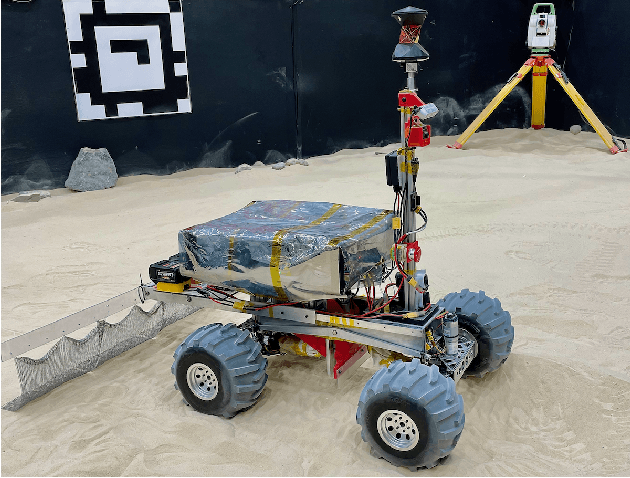
Establishing lunar infrastructure is paramount to long-term habitation on the Moon. To meet the demand for future lunar infrastructure development, we present CraterGrader, a novel system for autonomous robotic earthmoving tasks within lunar constraints. In contrast to the current approaches to construction autonomy, CraterGrader uses online perception for dynamic mapping of deformable terrain, devises an energy-efficient material movement plan using an optimization-based transport planner, precisely localizes without GPS, and uses integrated drive and tool control to manipulate regolith with unknown and non-constant geotechnical parameters. We demonstrate CraterGrader's ability to achieve unprecedented performance in autonomous smoothing and grading within a lunar-like environment, showing that this framework is capable, robust, and a benchmark for future planetary site preparation robotics.