Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal trajectory forecasting based on discrete heat map
Jun 22, 2021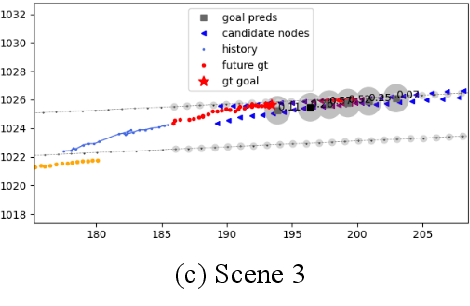
In Argoverse motion forecasting competition, the task is to predict the probabilistic future trajectory distribution for the interested targets in the traffic scene. We use vectorized lane map and 2 s targets' history trajectories as input. Then the model outputs 6 forecasted trajectories with probability for each target.
Via