 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCAN: A Spatial Context Attentive Network for Joint Multi-Agent Intent Prediction
Jan 29, 2021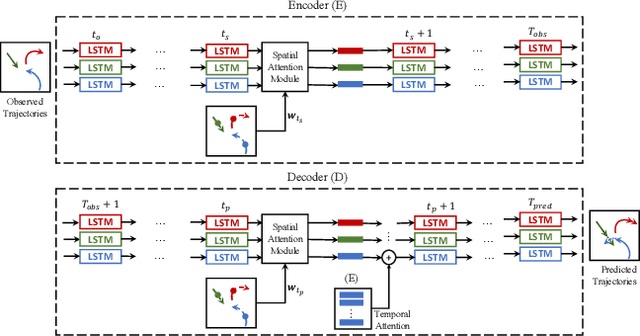

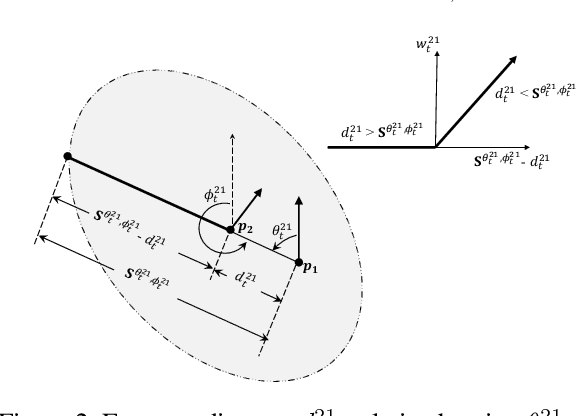
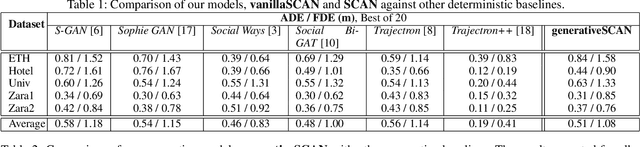
Safe navigation of autonomous agents in human centric environments requires the ability to understand and predict motion of neighboring pedestrians. However, predicting pedestrian intent is a complex problem. Pedestrian motion is governed by complex social navigation norms, is dependent on neighbors' trajectories, and is multimodal in nature. In this work, we propose \textbf{SCAN}, a \textbf{S}patial \textbf{C}ontext \textbf{A}ttentive \textbf{N}etwork that can jointly predict socially-acceptable multiple future trajectories for all pedestrians in a scene. SCAN encodes the influence of spatially close neighbors using a novel spatial attention mechanism in a manner that relies on fewer assumptions, is parameter efficient, and is more interpretable compared to state-of-the-art spatial attention approaches. Through experiments on several datasets we demonstrate that our approach can also quantitatively outperform state of the art trajectory prediction methods in terms of accuracy of predicted intent.
Towards Improved Testing For Deep Learning
Feb 17, 2019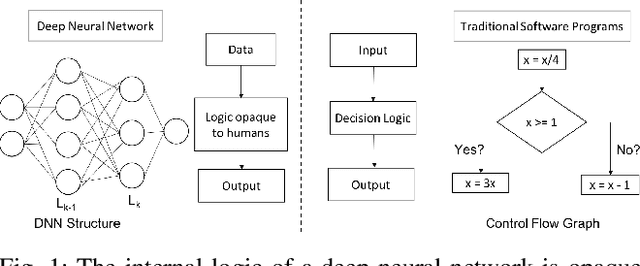
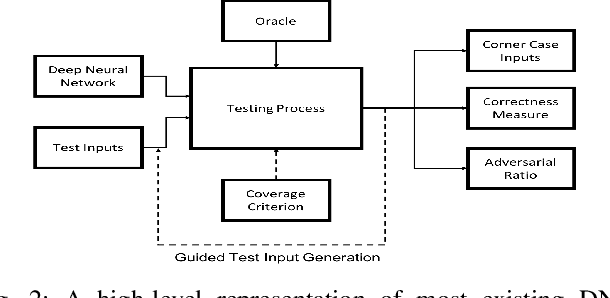
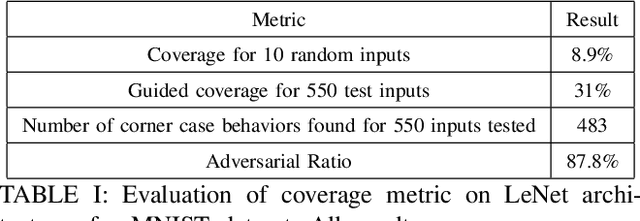
The growing use of deep neural networks in safety-critical applications makes it necessary to carry out adequate testing to detect and correct any incorrect behavior for corner case inputs before they can be actually used. Deep neural networks lack an explicit control-flow structure, making it impossible to apply to them traditional software testing criteria such as code coverage. In this paper, we examine existing testing methods for deep neural networks, the opportunities for improvement and the need for a fast, scalable, generalizable end-to-end testing method. We also propose a coverage criterion for deep neural networks that tries to capture all possible parts of the deep neural network's logic.