 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysing Ultra-Wide Band Positioning for Geofencing in a Safety Assurance Context
Mar 11, 2022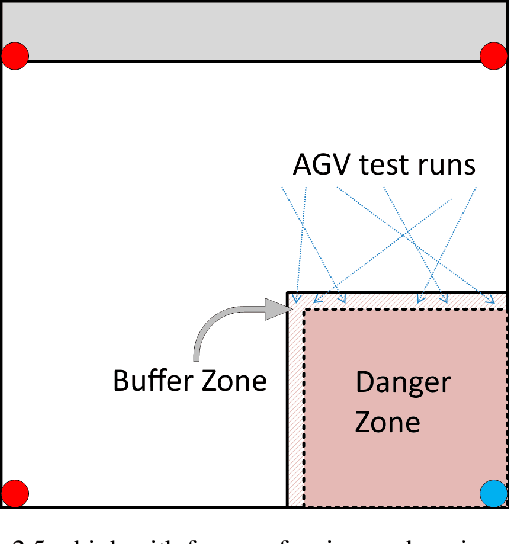
There is a desire to move towards more flexible and automated factories. To enable this, we need to assure the safety of these dynamic factories. This safety assurance must be achieved in a manner that does not unnecessarily constrain the systems and thus negate the benefits of flexibility and automation. We previously developed a modular safety assurance approach, using safety contracts, as a way to achieve this. In this case study we show how this approach can be applied to Autonomous Guided Vehicles (AGV) operating as part of a dynamic factory and why it is necessary. We empirically evaluate commercial, indoor fog/edge localisation technology to provide geofencing for hazardous areas in a laboratory. The experiments determine how factors such as AGV speeds, tag transmission timings, control software and AGV capabilities affect the ability of the AGV to stop outside the hazardous areas. We describe how this approach could be used to create a safety case for the AGV operation.