 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a Miniature Underwater Vehicle and Data Collection System for Indoor Experimentation
Feb 21, 2024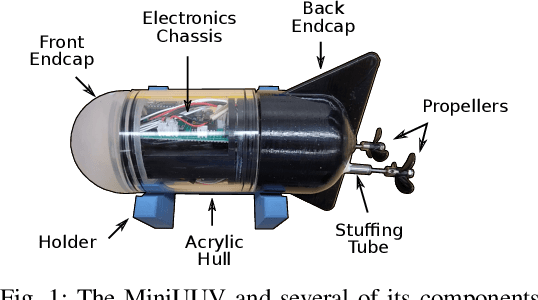
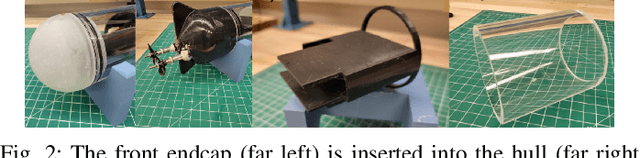
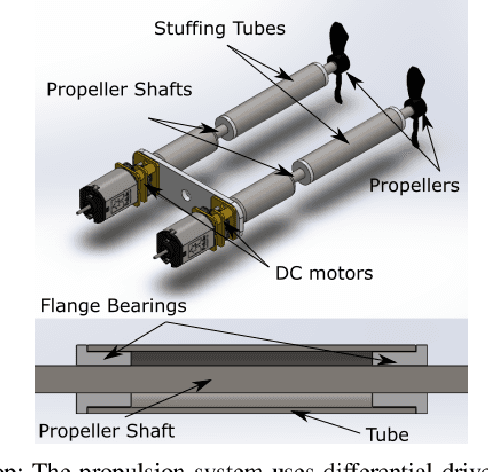
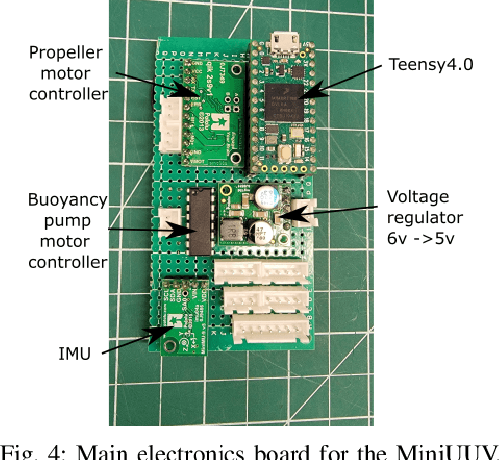
This paper describes the design of a miniature uncrewed underwater vehicle (MiniUUV) and related instrumentation for indoor experimentation. The MiniUUV was developed using 3D printed components and low-cost, off-the-shelf electronics. The vehicle uses a propeller differential propulsion drive and a peristaltic pump with a syringe for buoyancy control. A water tank with an overhead camera system was constructed to allow for convenient indoor data collection in a controlled environment. Several tests were conducted to demonstrate the capabilities of the MiniUUV and data collection system, including buoyancy pump actuation tests and straight line, circular, and zig-zag motion tests on the surface. During each planar motion test an AprilTag was attached to the MiniUUV and an overhead camera system obtained video recordings that were processed offline to estimate vehicle position, surge velocity, sway velocity, yaw angle, and yaw rate.