 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensor Validation Using Dynamic Belief Networks
Mar 13, 2013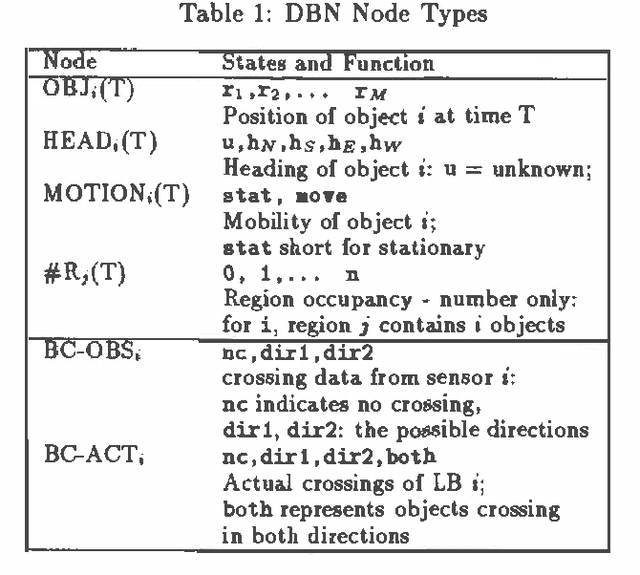
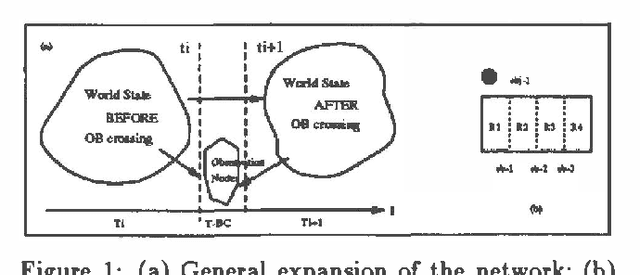
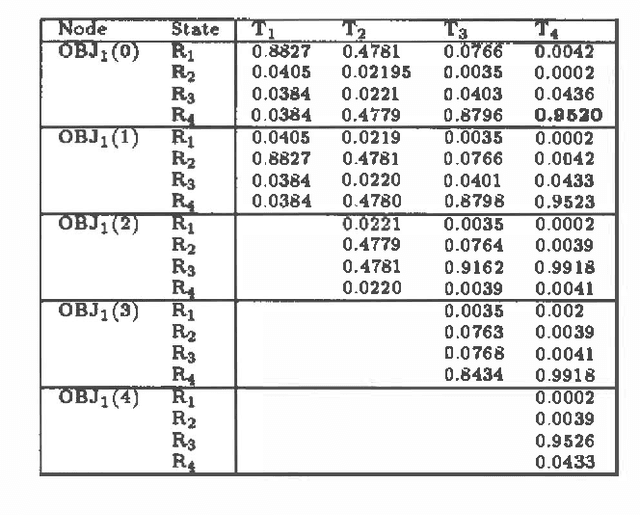
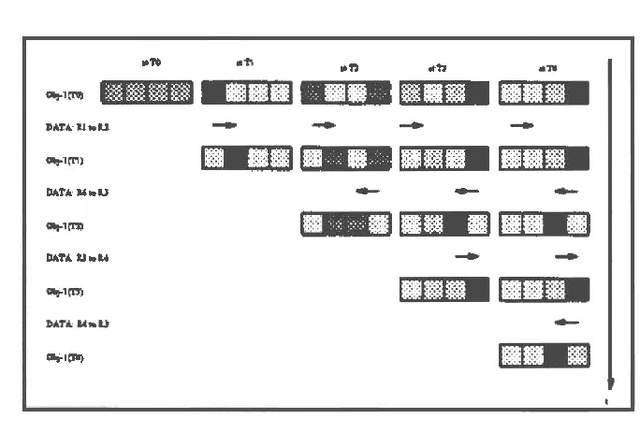
The trajectory of a robot is monitored in a restricted dynamic environment using light beam sensor data. We have a Dynamic Belief Network (DBN), based on a discrete model of the domain, which provides discrete monitoring analogous to conventional quantitative filter techniques. Sensor observations are added to the basic DBN in the form of specific evidence. However, sensor data is often partially or totally incorrect. We show how the basic DBN, which infers only an impossible combination of evidence, may be modified to handle specific types of incorrect data which may occur in the domain. We then present an extension to the DBN, the addition of an invalidating node, which models the status of the sensor as working or defective. This node provides a qualitative explanation of inconsistent data: it is caused by a defective sensor. The connection of successive instances of the invalidating node models the status of a sensor over time, allowing the DBN to handle both persistent and intermittent faults.