 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Quantification of Data-Driven Output Predictors in the Output Error Setting
Apr 23, 2024We revisit the problem of predicting the output of an LTI system directly using offline input-output data (and without the use of a parametric model) in the behavioral setting. Existing works calculate the output predictions by projecting the recent samples of the input and output signals onto the column span of a Hankel matrix consisting of the offline input-output data. However, if the offline data is corrupted by noise, the output prediction is no longer exact. While some prior works propose mitigating noisy data through matrix low-ranking approximation heuristics, such as truncated singular value decomposition, the ensuing prediction accuracy remains unquantified. This paper fills these gaps by introducing two upper bounds on the prediction error under the condition that the noise is sufficiently small relative to the offline data's magnitude. The first bound pertains to prediction using the raw offline data directly, while the second one applies to the case of low-ranking approximation heuristic. Notably, the bounds do not require the ground truth about the system output, relying solely on noisy measurements with a known noise level and system order. Extensive numerical simulations show that both bounds decrease monotonically (and linearly) as a function of the noise level. Furthermore, our results demonstrate that applying the de-noising heuristic in the output error setup does not generally lead to a better prediction accuracy as compared to using raw data directly, nor a smaller upper bound on the prediction error. However, it allows for a more general upper bound, as the first upper bound requires a specific condition on the partitioning of the Hankel matrix.
Adjusted least squares fitting of algebraic hypersurfaces
Aug 20, 2015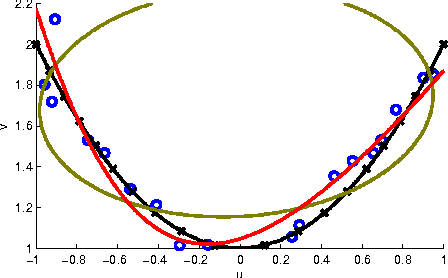
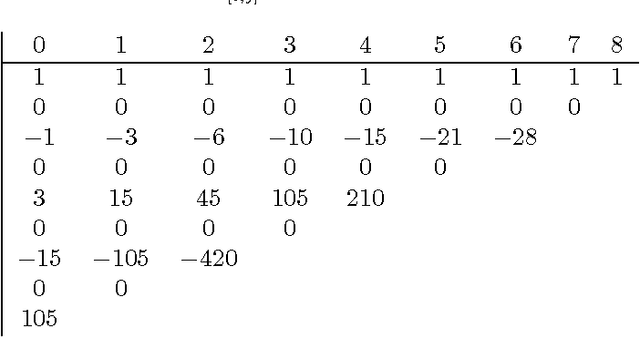

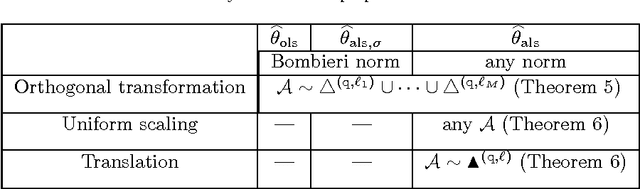
We consider the problem of fitting a set of points in Euclidean space by an algebraic hypersurface. We assume that points on a true hypersurface, described by a polynomial equation, are corrupted by zero mean independent Gaussian noise, and we estimate the coefficients of the true polynomial equation. The adjusted least squares estimator accounts for the bias present in the ordinary least squares estimator. The adjusted least squares estimator is based on constructing a quasi-Hankel matrix, which is a bias-corrected matrix of moments. For the case of unknown noise variance, the estimator is defined as a solution of a polynomial eigenvalue problem. In this paper, we present new results on invariance properties of the adjusted least squares estimator and an improved algorithm for computing the estimator for an arbitrary set of monomials in the polynomial equation.