 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Muon Space GNSS-R Surface Soil Moisture Product
Nov 26, 2024Muon Space (Muon) is building a constellation of small satellites, many of which will carry global navigation satellite system-reflectometry (GNSS-R) receivers. In preparation for the launch of this constellation, we have developed a generalized deep learning retrieval pipeline, which now produces operational GNSS-R near-surface soil moisture retrievals using data from NASA's Cyclone GNSS (CYGNSS) mission. In this article, we describe the input datasets, preprocessing methods, model architecture, development methods, and detail the soil moisture products generated from these retrievals. The performance of this product is quantified against in situ measurements and compared to both the target dataset (retrievals from the Soil Moisture Active-Passive (SMAP) satellite) and the v1.0 soil moisture product from the CYGNSS mission. The Muon Space product achieves improvements in spatial resolution over SMAP with comparable performance in many regions. An ubRMSE of 0.032 cm$^3$ cm$^{-3}$ for in situ soil moisture observations from SMAP core validation sites is shown, though performance is lower than SMAP's when comparing in forests and/or mountainous terrain. The Muon Space product outperforms the v1.0 CYGNSS soil moisture product in almost all aspects. This initial release serves as the foundation of our operational soil moisture product, which soon will additionally include data from Muon Space satellites.
Deep-learning based measurement of planetary radial velocities in the presence of stellar variability
Apr 12, 2023We present a deep-learning based approach for measuring small planetary radial velocities in the presence of stellar variability. We use neural networks to reduce stellar RV jitter in three years of HARPS-N sun-as-a-star spectra. We develop and compare dimensionality-reduction and data splitting methods, as well as various neural network architectures including single line CNNs, an ensemble of single line CNNs, and a multi-line CNN. We inject planet-like RVs into the spectra and use the network to recover them. We find that the multi-line CNN is able to recover planets with 0.2 m/s semi-amplitude, 50 day period, with 8.8% error in the amplitude and 0.7% in the period. This approach shows promise for mitigating stellar RV variability and enabling the detection of small planetary RVs with unprecedented precision.
Detecting Spacecraft Anomalies Using LSTMs and Nonparametric Dynamic Thresholding
Jun 06, 2018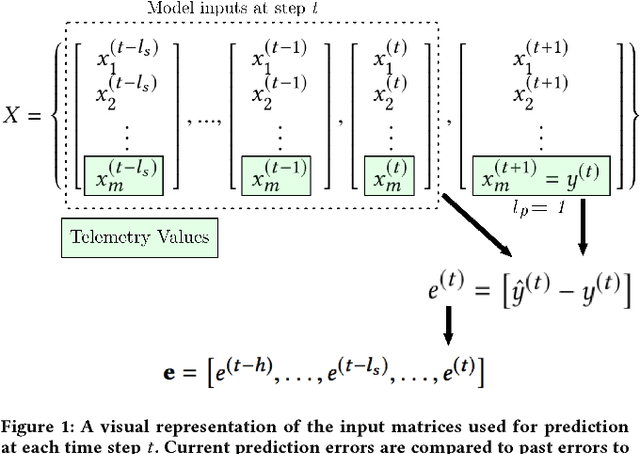
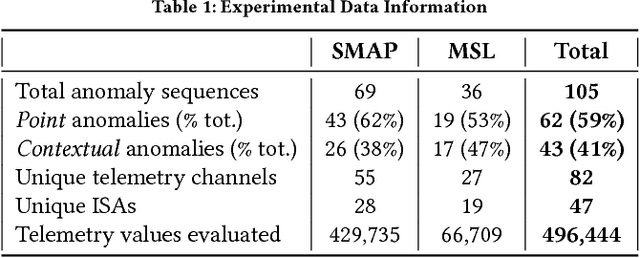
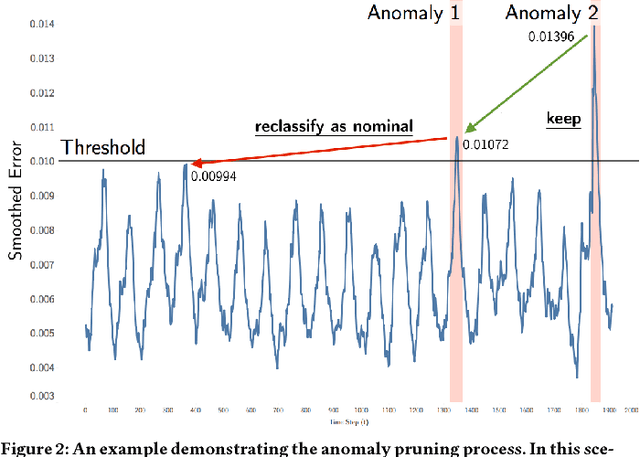
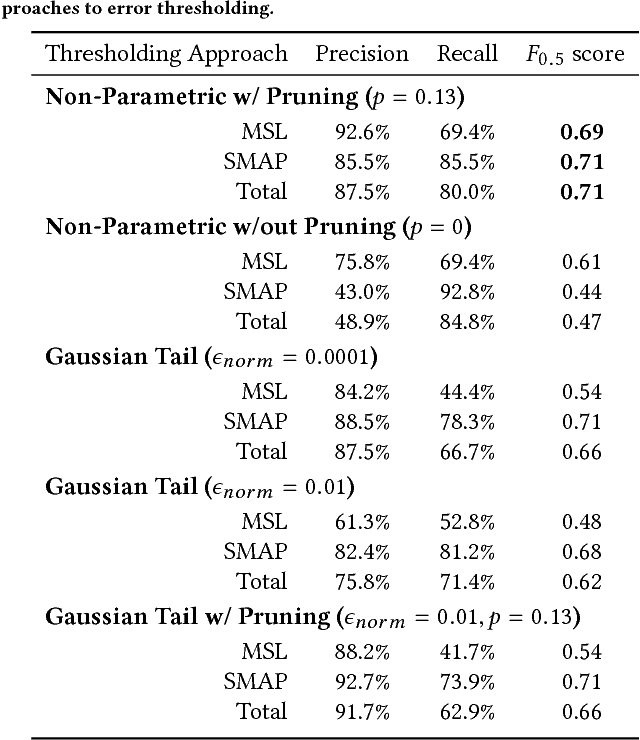
As spacecraft send back increasing amounts of telemetry data, improved anomaly detection systems are needed to lessen the monitoring burden placed on operations engineers and reduce operational risk. Current spacecraft monitoring systems only target a subset of anomaly types and often require costly expert knowledge to develop and maintain due to challenges involving scale and complexity. We demonstrate the effectiveness of Long Short-Term Memory (LSTMs) networks, a type of Recurrent Neural Network (RNN), in overcoming these issues using expert-labeled telemetry anomaly data from the Soil Moisture Active Passive (SMAP) satellite and the Mars Science Laboratory (MSL) rover, Curiosity. We also propose a complementary unsupervised and nonparametric anomaly thresholding approach developed during a pilot implementation of an anomaly detection system for SMAP, and offer false positive mitigation strategies along with other key improvements and lessons learned during development.