 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Outdoor Autonomous Moble Robot
Jan 29, 2022



This study presents the design of a six-wheeled outdoor autonomous mobile robot. The main design goal of our robot is to increase its adaptability and flexibility when moving outdoors. This six-wheeled robot platform was equipped with some sensors, such as a global positioning system (GPS), high definition (HD) webcam, light detection and ranging (LiDAR), and rotary encoders. A personal mobile computer and 86Duino ONE microcontroller were used as the algorithm computing platform. In terms of control, the lateral offset and head angle offset of the robot were calculated using a differential GPS or a camera to detect structured and unstructured road boundaries. The lateral offset and head angle offset were fed to a fuzzy controller. The control input was designed by Q-learning of the differential speed between the left and right wheels. This made the robot track a reference route so that it could stay in its own lane. 2D LiDAR was also used to measure the relative distance from the front obstacle. The robot would immediately stop to avoid a collision when the distance between the robot and obstacle was less than a specific safety distance. A custom-designed rocker arm gave the robot the ability to climb a low step. Body balance could be maintained by controlling the angle of the rocker arm when the robot changed its pose. The autonomous mobile robot has been used for delivery service on our campus road by integrating the above system functionality.
Design of Sensor Fusion Driver Assistance System for Active Pedestrian Safety
Jan 23, 2022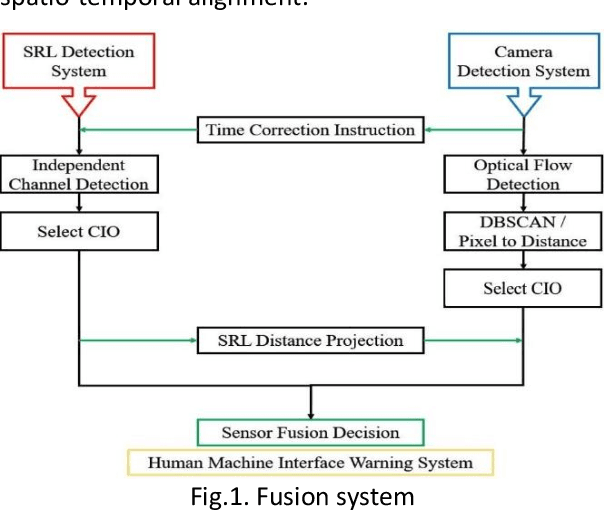
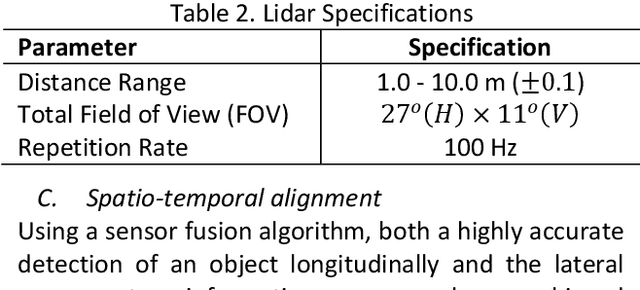
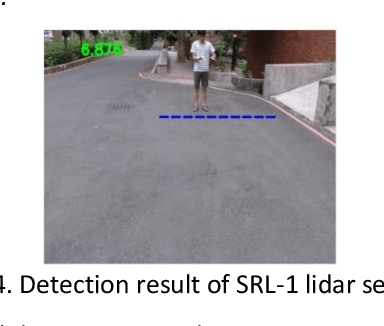
In this paper, we present a parallel architecture for a sensor fusion detection system that combines a camera and 1D light detection and ranging (lidar) sensor for object detection. The system contains two object detection methods, one based on an optical flow, and the other using lidar. The two sensors can effectively complement the defects of the other. The accurate longitudinal accuracy of the object's location and its lateral movement information can be achieved simultaneously. Using a spatio-temporal alignment and a policy of sensor fusion, we completed the development of a fusion detection system with high reliability at distances of up to 20 m. Test results show that the proposed system achieves a high level of accuracy for pedestrian or object detection in front of a vehicle, and has high robustness to special environments.