 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom 9-IM Topological Operators to Qualitative Spatial Relations using 3D Selective Nef Complexes and Logic Rules for bodies
Jan 21, 2013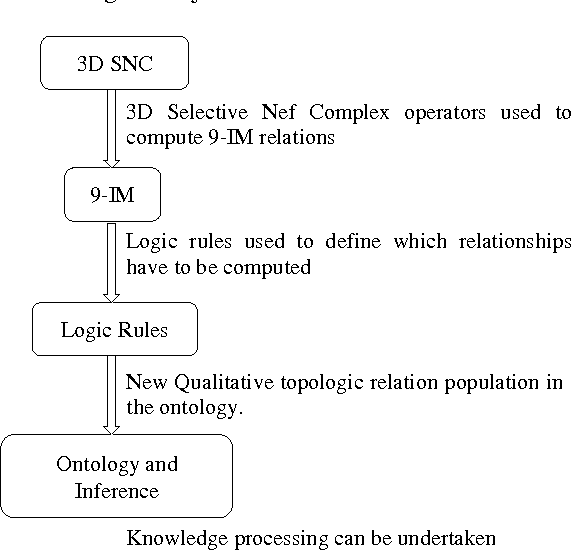
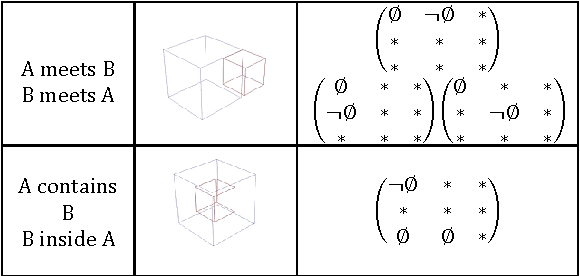
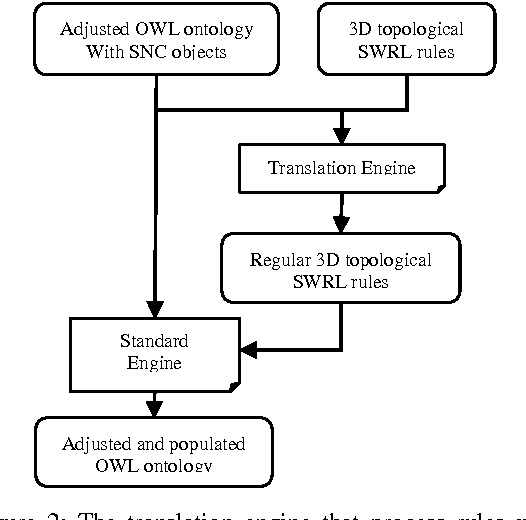

This paper presents a method to compute automatically topological relations using SWRL rules. The calculation of these rules is based on the definition of a Selective Nef Complexes Nef Polyhedra structure generated from standard Polyhedron. The Selective Nef Complexes is a data model providing a set of binary Boolean operators such as Union, Difference, Intersection and Symmetric difference, and unary operators such as Interior, Closure and Boundary. In this work, these operators are used to compute topological relations between objects defined by the constraints of the 9 Intersection Model (9-IM) from Egenhofer. With the help of these constraints, we defined a procedure to compute the topological relations on Nef polyhedra. These topological relationships are Disjoint, Meets, Contains, Inside, Covers, CoveredBy, Equals and Overlaps, and defined in a top-level ontology with a specific semantic definition on relation such as Transitive, Symmetric, Asymmetric, Functional, Reflexive, and Irreflexive. The results of the computation of topological relationships are stored in an OWL-DL ontology allowing after what to infer on these new relationships between objects. In addition, logic rules based on the Semantic Web Rule Language allows the definition of logic programs that define which topological relationships have to be computed on which kind of objects with specific attributes. For instance, a "Building" that overlaps a "Railway" is a "RailStation".
* arXiv admin note: substantial text overlap with arXiv:1301.4780
Integration of knowledge to support automatic object reconstruction from images and 3D data
Jan 21, 2013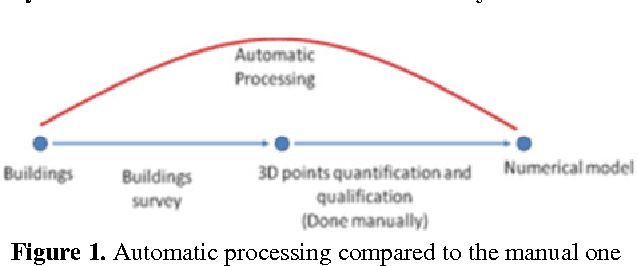

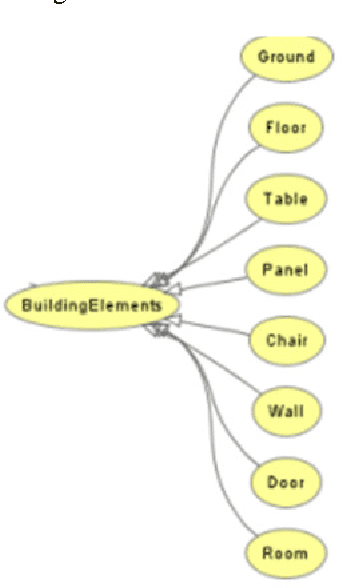

Object reconstruction is an important task in many fields of application as it allows to generate digital representations of our physical world used as base for analysis, planning, construction, visualization or other aims. A reconstruction itself normally is based on reliable data (images, 3D point clouds for example) expressing the object in his complete extent. This data then has to be compiled and analyzed in order to extract all necessary geometrical elements, which represent the object and form a digital copy of it. Traditional strategies are largely based on manual interaction and interpretation, because with increasing complexity of objects human understanding is inevitable to achieve acceptable and reliable results. But human interaction is time consuming and expensive, why many researches has already been invested to use algorithmic support, what allows to speed up the process and to reduce manual work load. Presently most of such supporting algorithms are data-driven and concentate on specific features of the objects, being accessible to numerical models. By means of these models, which normally will represent geometrical (flatness, roughness, for example) or physical features (color, texture), the data is classified and analyzed. This is successful for objects with low complexity, but gets to its limits with increasing complexness of objects. Then purely numerical strategies are not able to sufficiently model the reality. Therefore, the intention of our approach is to take human cognitive strategy as an example, and to simulate extraction processes based on available human defined knowledge for the objects of interest. Such processes will introduce a semantic structure for the objects and guide the algorithms used to detect and recognize objects, which will yield a higher effectiveness. Hence, our research proposes an approach using knowledge to guide the algorithms in 3D point cloud and image processing.
Knowledge Base Approach for 3D Objects Detection in Point Clouds Using 3D Processing and Specialists Knowledge
Jan 21, 2013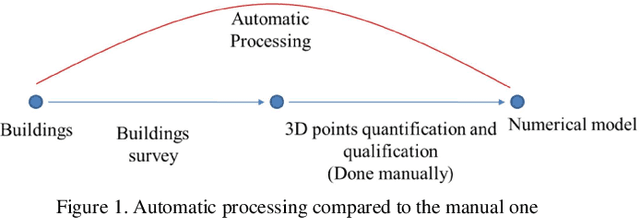
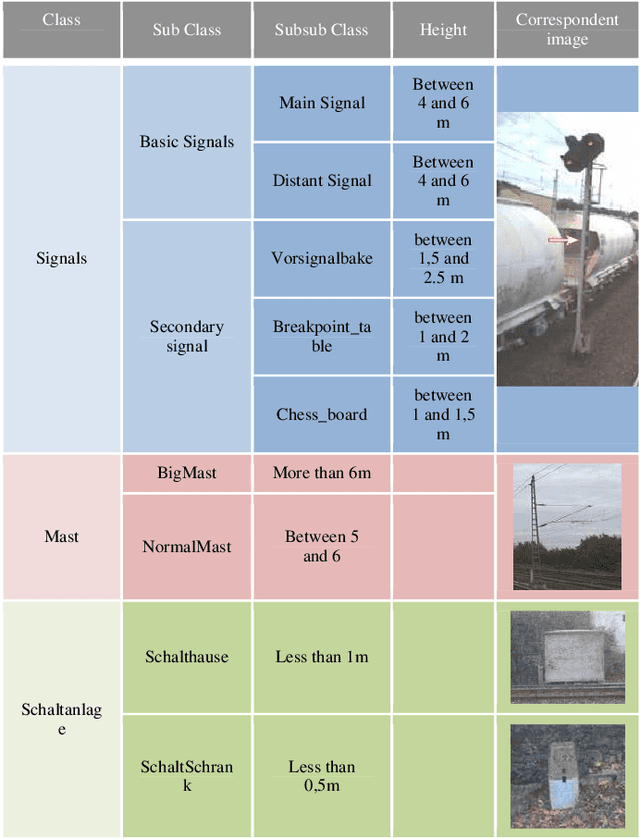
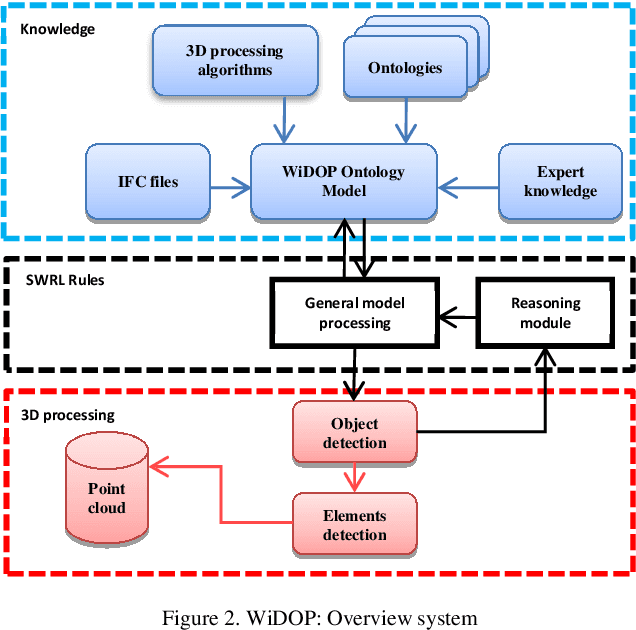
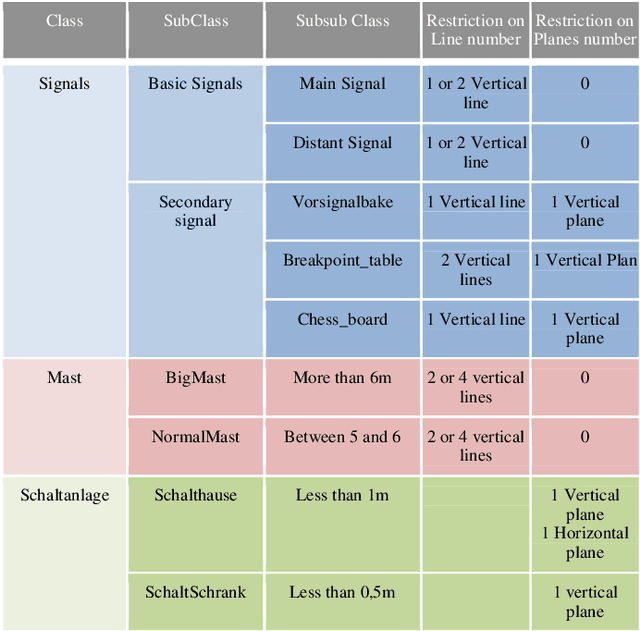
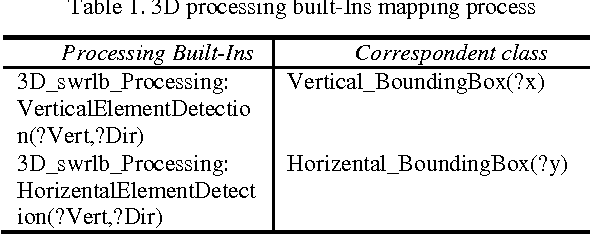
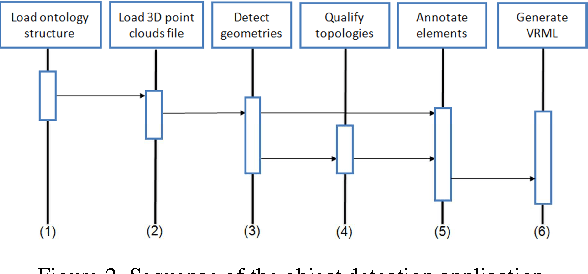
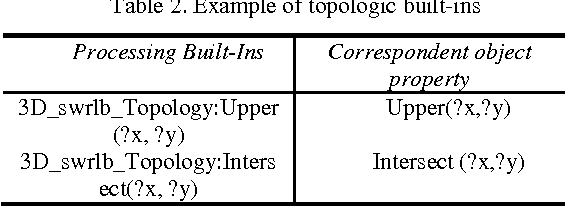
This paper presents a knowledge-based detection of objects approach using the OWL ontology language, the Semantic Web Rule Language, and 3D processing built-ins aiming at combining geometrical analysis of 3D point clouds and specialist's knowledge. Here, we share our experience regarding the creation of 3D semantic facility model out of unorganized 3D point clouds. Thus, a knowledge-based detection approach of objects using the OWL ontology language is presented. This knowledge is used to define SWRL detection rules. In addition, the combination of 3D processing built-ins and topological Built-Ins in SWRL rules allows a more flexible and intelligent detection, and the annotation of objects contained in 3D point clouds. The created WiDOP prototype takes a set of 3D point clouds as input, and produces as output a populated ontology corresponding to an indexed scene visualized within VRML language. The context of the study is the detection of railway objects materialized within the Deutsche Bahn scene such as signals, technical cupboards, electric poles, etc. Thus, the resulting enriched and populated ontology, that contains the annotations of objects in the point clouds, is used to feed a GIS system or an IFC file for architecture purposes.
* ISSN: 1942-2679. arXiv admin note: text overlap with arXiv:1301.4783
Toward the Automatic Generation of a Semantic VRML Model from Unorganized 3D Point Clouds
Jan 21, 2013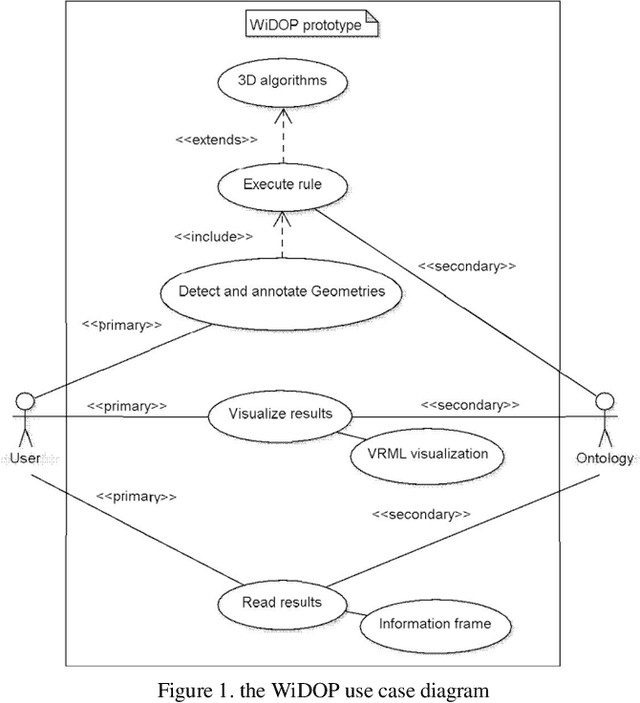
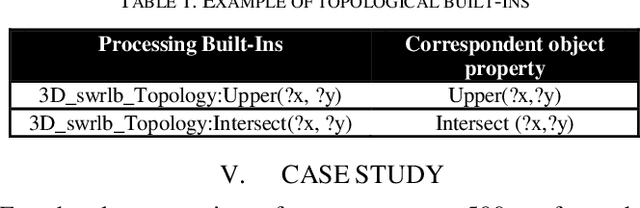
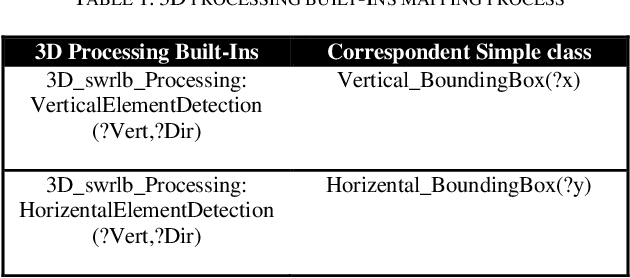

This paper presents our experience regarding the creation of 3D semantic facility model out of unorganized 3D point clouds. Thus, a knowledge-based detection approach of objects using the OWL ontology language is presented. This knowledge is used to define SWRL detection rules. In addition, the combination of 3D processing built-ins and topological Built-Ins in SWRL rules aims at combining geometrical analysis of 3D point clouds and specialist's knowledge. This combination allows more flexible and intelligent detection and the annotation of objects contained in 3D point clouds. The created WiDOP prototype takes a set of 3D point clouds as input, and produces an indexed scene of colored objects visualized within VRML language as output. The context of the study is the detection of railway objects materialized within the Deutsche Bahn scene such as signals, technical cupboards, electric poles, etc. Therefore, the resulting enriched and populated domain ontology, that contains the annotations of objects in the point clouds, is used to feed a GIS system.
* arXiv admin note: substantial text overlap with arXiv:1301.4991, arXiv:1301.4783
From 3D Point Clouds To Semantic Objects An Ontology-Based Detection Approach
Jan 21, 2013
This paper presents a knowledge-based detection of objects approach using the OWL ontology language, the Semantic Web Rule Language, and 3D processing built-ins aiming at combining geometrical analysis of 3D point clouds and specialist's knowledge. This combination allows the detection and the annotation of objects contained in point clouds. The context of the study is the detection of railway objects such as signals, technical cupboards, electric poles, etc. Thus, the resulting enriched and populated ontology, that contains the annotations of objects in the point clouds, is used to feed a GIS systems or an IFC file for architecture purposes.
From Quantitative Spatial Operator to Qualitative Spatial Relation Using Constructive Solid Geometry, Logic Rules and Optimized 9-IM Model, A Semantic Based Approach
Jan 21, 2013
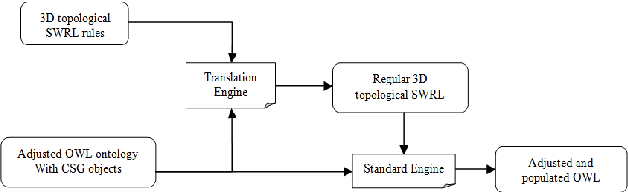

The Constructive Solid Geometry (CSG) is a data model providing a set of binary Boolean operators such as Union, Difference and Intersection. In this work, these operators are used to compute topological relations between objects defined by the constraints of the nine Intersection Model (9-IM) from Egenhofer. With the help of these constraints, we define a procedure to compute the topological relations on CSG objects. These topological relations are Disjoint, Contains, Inside, Covers, CoveredBy, Equals and Overlaps, and are defined in a top-level ontology with a specific semantic definition on relation such as Transitive, Symmetric, Asymmetric, Functional, Reflexive, and Irreflexive. The results of topological relations computation are stored in the ontology allowing after what to infer on these topological relationships. In addition, logic rules based on the Semantic Web Language allows the definition of logic programs that define which topological relationships have to be computed on which kind of objects. For instance, a "Building" that overlaps a "Railway" is a "RailStation".