Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Driving Car Steering Angle Prediction Based on Image Recognition
Dec 11, 2019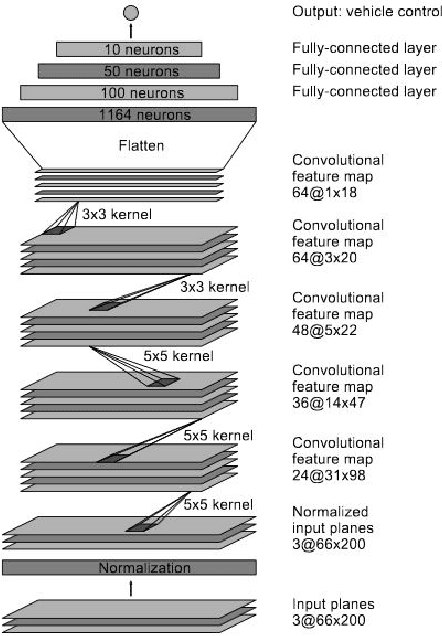
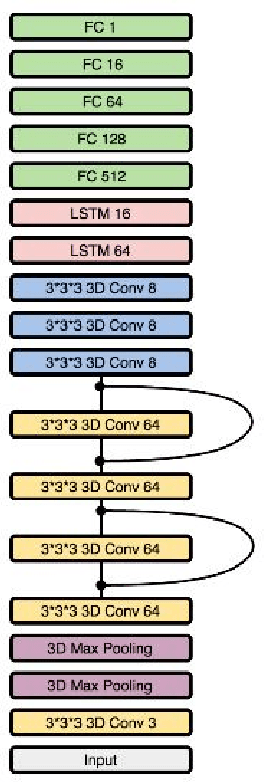
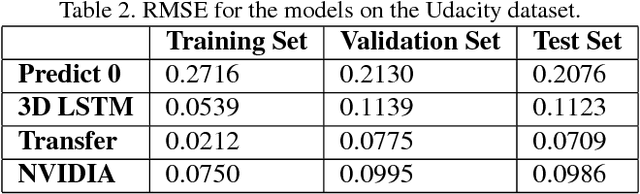

Self-driving vehicles have expanded dramatically over the last few years. Udacity has release a dataset containing, among other data, a set of images with the steering angle captured during driving. The Udacity challenge aimed to predict steering angle based on only the provided images. We explore two different models to perform high quality prediction of steering angles based on images using different deep learning techniques including Transfer Learning, 3D CNN, LSTM and ResNet. If the Udacity challenge was still ongoing, both of our models would have placed in the top ten of all entries.
* 9 pages 13 figures. Paper originally from CS231n (Stanford) 2017
Via