 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl of a 2-DoF robotic arm using a P300-based brain-computer interface
Jan 05, 2019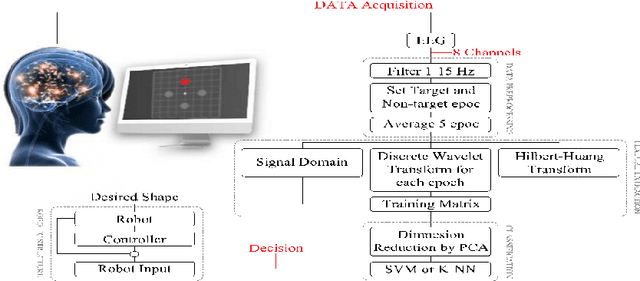
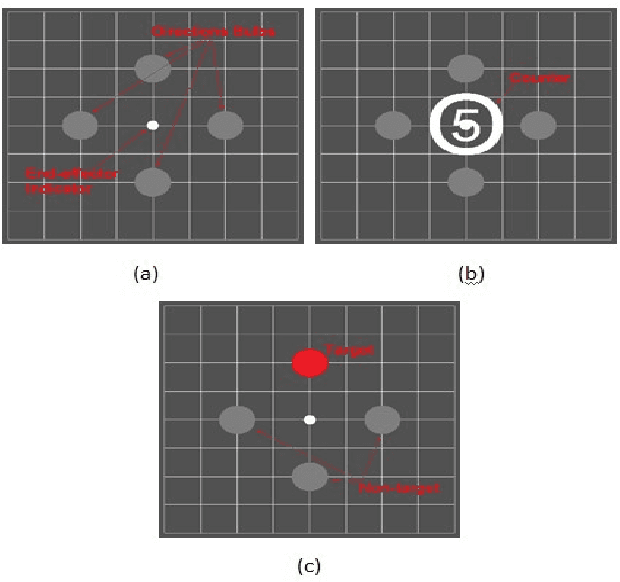

In this study, a novel control algorithm for a P-300 based brain-computer interface is fully developed to control a 2-DoF robotic arm. Eight subjects including 5 men and 3 women, perform a 2-dimensional target tracking task in a simulated environment. Their EEG signals from visual cortex are recorded and P-300 components are extracted and evaluated to perform a real-time BCI based controller. The volunteer's intention is recognized and will be decoded as an appropriate command to control the cursor. The final goal of the system is to control a simulated robotic arm in a 2-dimensional space for writing some English letters. The results show that the system allows the robot end-effector to move between arbitrary positions in a point-to-point session with the desired accuracy. This model is tested on and compared with Dataset II of the BCI Competition. The best result is obtained with a multi-class SVM solution as the classifier, with a recognition rate of 97 percent, without pre-channel selection.