 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA novel approach to model exploration for value function learning
Jun 06, 2019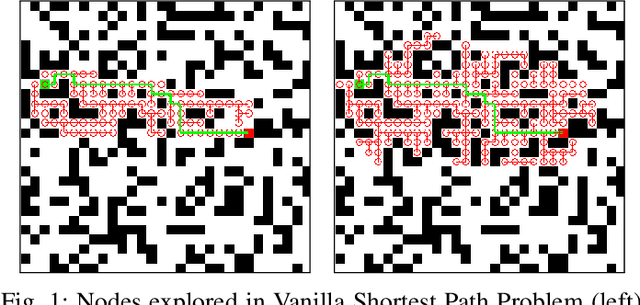

Planning and Learning are complementary approaches. Planning relies on deliberative reasoning about the current state and sequence of future reachable states to solve the problem. Learning, on the other hand, is focused on improving system performance based on experience or available data. Learning to improve the performance of planning based on experience in similar, previously solved problems, is ongoing research. One approach is to learn Value function (cost-to-go) which can be used as heuristics for speeding up search-based planning. Existing approaches in this direction use the results of the previous search for learning the heuristics. In this work, we present a search-inspired approach of systematic model exploration for the learning of the value function which does not stop when a plan is available but rather prolongs search such that not only resulting optimal path is used but also extended region around the optimal path. This, in turn, improves both the efficiency and robustness of successive planning. Additionally, the effect of losing admissibility by using ML heuristic is managed by bounding ML with other admissible heuristics.