 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEdgeFlex-Transformer: Transformer Inference for Edge Devices
Dec 17, 2025Deploying large-scale transformer models on edge devices presents significant challenges due to strict constraints on memory, compute, and latency. In this work, we propose a lightweight yet effective multi-stage optimization pipeline designed to compress and accelerate Vision Transformers (ViTs) for deployment in resource-constrained environments. Our methodology combines activation profiling, memory-aware pruning, selective mixed-precision execution, and activation-aware quantization (AWQ) to reduce the model's memory footprint without requiring costly retraining or task-specific fine-tuning. Starting from a ViT-Huge backbone with 632 million parameters, we first identify low-importance channels using activation statistics collected via forward hooks, followed by structured pruning to shrink the MLP layers under a target memory budget. We further apply FP16 conversion to selected components and leverage AWQ to quantize the remaining model weights and activations to INT8 with minimal accuracy degradation. Our experiments on CIFAR-10 demonstrate that the fully optimized model achieves a 76% reduction in peak memory usage and over 6x lower latency, while retaining or even improving accuracy compared to the original FP32 baseline. This framework offers a practical path toward efficient transformer inference on edge platforms, and opens future avenues for integrating dynamic sparsity and Mixture-of-Experts (MoE) architectures to further scale performance across diverse tasks.
On-device Large Multi-modal Agent for Human Activity Recognition
Dec 17, 2025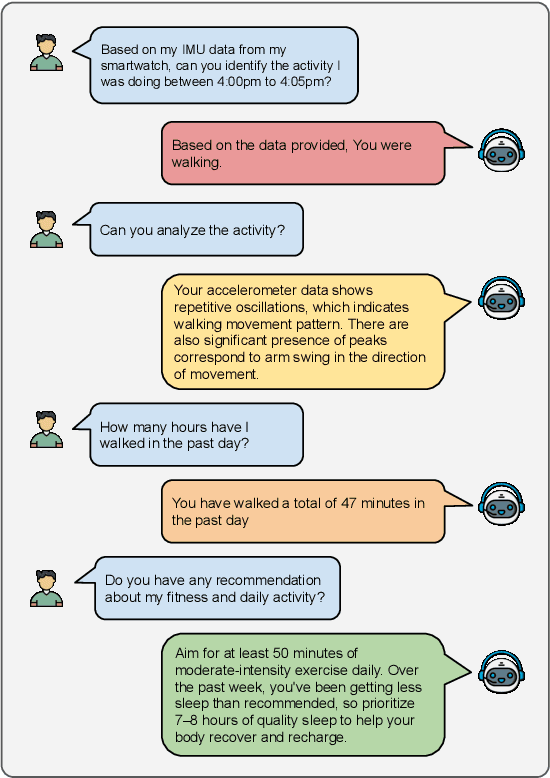



Human Activity Recognition (HAR) has been an active area of research, with applications ranging from healthcare to smart environments. The recent advancements in Large Language Models (LLMs) have opened new possibilities to leverage their capabilities in HAR, enabling not just activity classification but also interpretability and human-like interaction. In this paper, we present a Large Multi-Modal Agent designed for HAR, which integrates the power of LLMs to enhance both performance and user engagement. The proposed framework not only delivers activity classification but also bridges the gap between technical outputs and user-friendly insights through its reasoning and question-answering capabilities. We conduct extensive evaluations using widely adopted HAR datasets, including HHAR, Shoaib, Motionsense to assess the performance of our framework. The results demonstrate that our model achieves high classification accuracy comparable to state-of-the-art methods while significantly improving interpretability through its reasoning and Q&A capabilities.
Energy Efficient LoRaWAN in LEO Satellites
Dec 30, 2024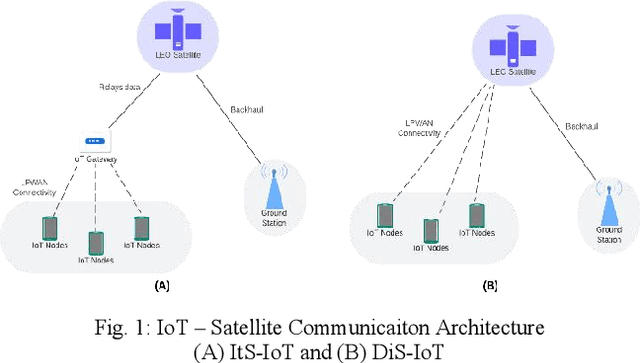
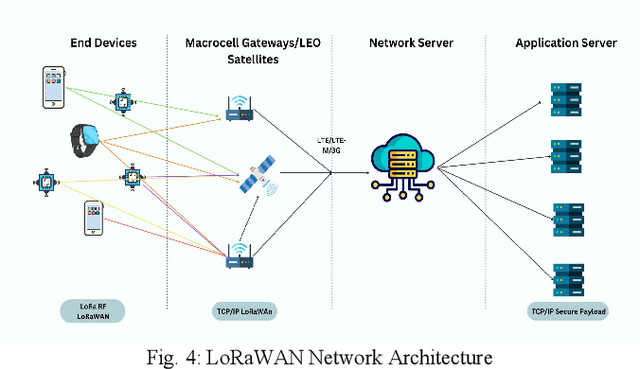
LPWAN service's inexpensive cost and long range capabilities make it a promising addition and countless satellite companies have started taking advantage of this technology to connect IoT users across the globe. However, LEO satellites have the unique challenge of using rechargeable batteries and green solar energy to power their components. LPWAN technology is not optimized to maximize battery lifespan of network nodes. By incorporating a MAC protocol that maximizes node the battery lifespan across the network, we can reduce battery waste and usage of scarce Earth resources to develop satellite batteries.
Data Classification With Multiprocessing
Dec 23, 2023Classification is one of the most important tasks in Machine Learning (ML) and with recent advancements in artificial intelligence (AI) it is important to find efficient ways to implement it. Generally, the choice of classification algorithm depends on the data it is dealing with, and accuracy of the algorithm depends on the hyperparameters it is tuned with. One way is to check the accuracy of the algorithms by executing it with different hyperparameters serially and then selecting the parameters that give the highest accuracy to predict the final output. This paper proposes another way where the algorithm is parallelly trained with different hyperparameters to reduce the execution time. In the end, results from all the trained variations of the algorithms are ensembled to exploit the parallelism and improve the accuracy of prediction. Python multiprocessing is used to test this hypothesis with different classification algorithms such as K-Nearest Neighbors (KNN), Support Vector Machines (SVM), random forest and decision tree and reviews factors affecting parallelism. Ensembled output considers the predictions from all processes and final class is the one predicted by maximum number of processes. Doing this increases the reliability of predictions. We conclude that ensembling improves accuracy and multiprocessing reduces execution time for selected algorithms.
Efficient Semantic Segmentation on Edge Devices
Dec 28, 2022



Semantic segmentation works on the computer vision algorithm for assigning each pixel of an image into a class. The task of semantic segmentation should be performed with both accuracy and efficiency. Most of the existing deep FCNs yield to heavy computations and these networks are very power hungry, unsuitable for real-time applications on portable devices. This project analyzes current semantic segmentation models to explore the feasibility of applying these models for emergency response during catastrophic events. We compare the performance of real-time semantic segmentation models with non-real-time counterparts constrained by aerial images under oppositional settings. Furthermore, we train several models on the Flood-Net dataset, containing UAV images captured after Hurricane Harvey, and benchmark their execution on special classes such as flooded buildings vs. non-flooded buildings or flooded roads vs. non-flooded roads. In this project, we developed a real-time UNet based model and deployed that network on Jetson AGX Xavier module.