 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-based navigation and obstacle avoidance via deep reinforcement learning
Nov 09, 2022



Development of navigation algorithms is essential for the successful deployment of robots in rapidly changing hazardous environments for which prior knowledge of configuration is often limited or unavailable. Use of traditional path-planning algorithms, which are based on localization and require detailed obstacle maps with goal locations, is not possible. In this regard, vision-based algorithms hold great promise, as visual information can be readily acquired by a robot's onboard sensors and provides a much richer source of information from which deep neural networks can extract complex patterns. Deep reinforcement learning has been used to achieve vision-based robot navigation. However, the efficacy of these algorithms in environments with dynamic obstacles and high variation in the configuration space has not been thoroughly investigated. In this paper, we employ a deep Dyna-Q learning algorithm for room evacuation and obstacle avoidance in partially observable environments based on low-resolution raw image data from an onboard camera. We explore the performance of a robotic agent in environments containing no obstacles, convex obstacles, and concave obstacles, both static and dynamic. Obstacles and the exit are initialized in random positions at the start of each episode of reinforcement learning. Overall, we show that our algorithm and training approach can generalize learning for collision-free evacuation of environments with complex obstacle configurations. It is evident that the agent can navigate to a goal location while avoiding multiple static and dynamic obstacles, and can escape from a concave obstacle while searching for and navigating to the exit.
Deep reinforcement learning with a particle dynamics environment applied to emergency evacuation of a room with obstacles
Nov 30, 2020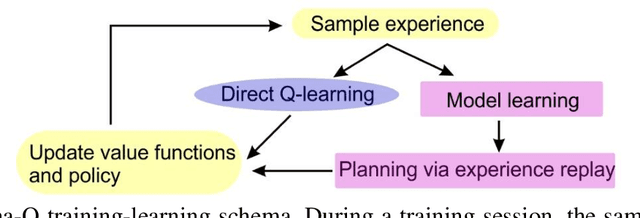
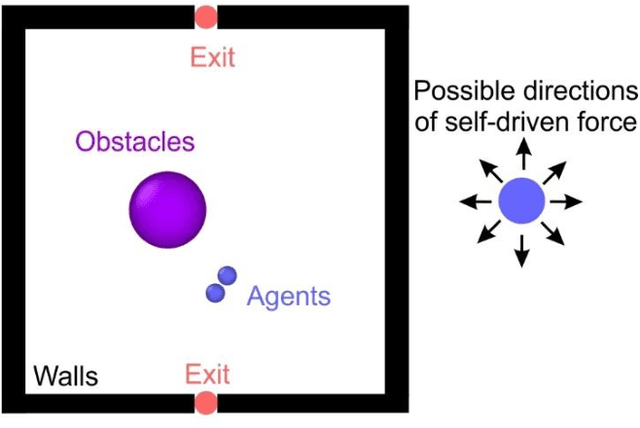
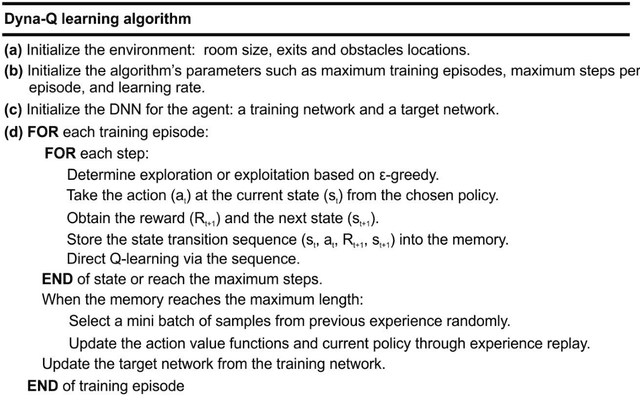
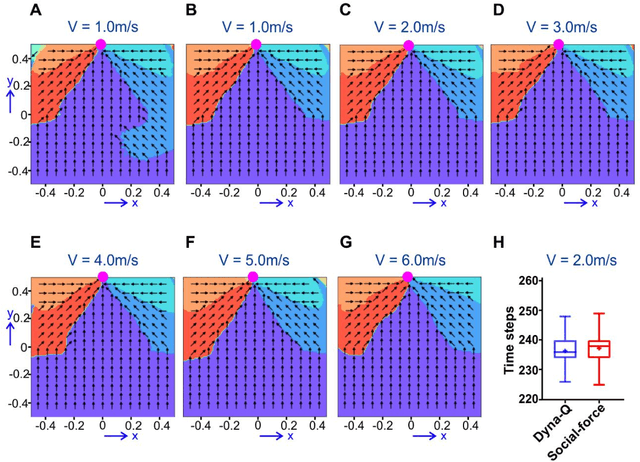
A very successful model for simulating emergency evacuation is the social-force model. At the heart of the model is the self-driven force that is applied to an agent and is directed towards the exit. However, it is not clear if the application of this force results in optimal evacuation, especially in complex environments with obstacles. Here, we develop a deep reinforcement learning algorithm in association with the social force model to train agents to find the fastest evacuation path. During training, we penalize every step of an agent in the room and give zero reward at the exit. We adopt the Dyna-Q learning approach. We first show that in the case of a room without obstacles the resulting self-driven force points directly towards the exit as in the social force model and that the median exit time intervals calculated using the two methods are not significantly different. Then, we investigate evacuation of a room with one obstacle and one exit. We show that our method produces similar results with the social force model when the obstacle is convex. However, in the case of concave obstacles, which sometimes can act as traps for agents governed purely by the social force model and prohibit complete room evacuation, our approach is clearly advantageous since it derives a policy that results in object avoidance and complete room evacuation without additional assumptions. We also study evacuation of a room with multiple exits. We show that agents are able to evacuate efficiently from the nearest exit through a shared network trained for a single agent. Finally, we test the robustness of the Dyna-Q learning approach in a complex environment with multiple exits and obstacles. Overall, we show that our model can efficiently simulate emergency evacuation in complex environments with multiple room exits and obstacles where it is difficult to obtain an intuitive rule for fast evacuation.