 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriver Assistance for Safe and Comfortable On-Ramp Merging Using Environment Models Extended through V2X Communication and Role-Based Behavior Predictions
Aug 17, 2020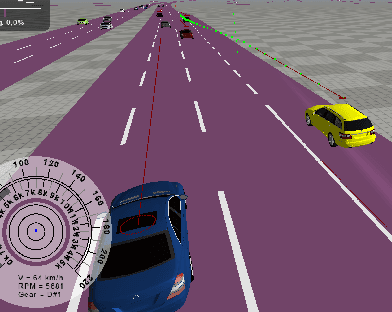
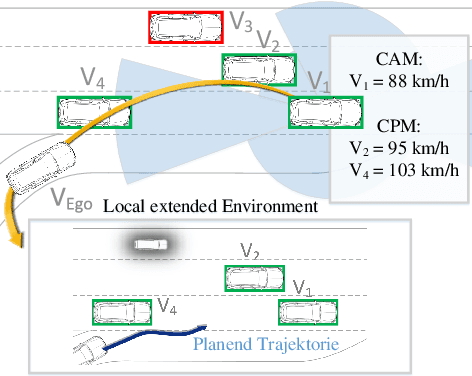
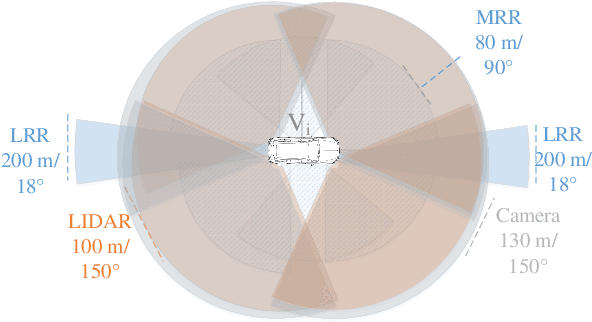
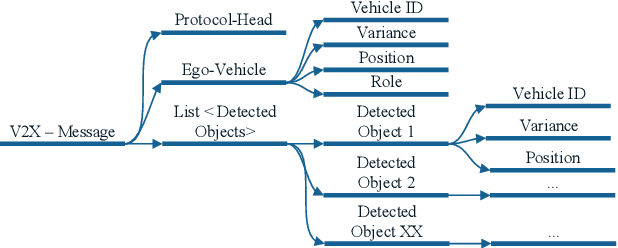
Modern driver assistance systems as well as autonomous vehicles take their decisions based on local maps of the environment. These maps include, for example, surrounding moving objects perceived by sensors as well as routes and navigation information. Current research in the field of environment mapping is concerned with two major challenges. The first one is the integration of information from different sources e.g. on-board sensors like radar, camera, ultrasound and lidar, offline map data or backend information. The second challenge comprises in finding an abstract representation of this aggregated information with suitable interfaces for different driving functions and traffic situations. To overcome these challenges, an extended environment model is a reasonable choice. In this paper, we show that role-based motion predictions in combination with v2x-extended environment models are able to contribute to increased traffic safety and driving comfort. Thus, we combine the mentioned research areas and show possible improvements, using the example of a threading process at a motorway access road. Furthermore, it is shown that already an average v2x equipment penetration of 80% can lead to a significant improvement of 0.33m/s^2 of the total acceleration and 12m more safety distance compared to non v2x-equipped vehicles during the threading process.