 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Approximate POMDP solutions Through Belief Compression
Oct 04, 2011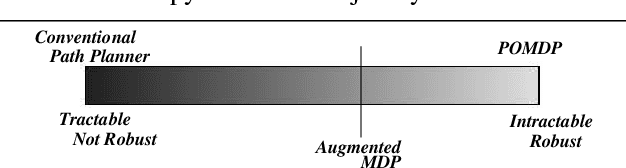



Standard value function approaches to finding policies for Partially Observable Markov Decision Processes (POMDPs) are generally considered to be intractable for large models. The intractability of these algorithms is to a large extent a consequence of computing an exact, optimal policy over the entire belief space. However, in real-world POMDP problems, computing the optimal policy for the full belief space is often unnecessary for good control even for problems with complicated policy classes. The beliefs experienced by the controller often lie near a structured, low-dimensional subspace embedded in the high-dimensional belief space. Finding a good approximation to the optimal value function for only this subspace can be much easier than computing the full value function. We introduce a new method for solving large-scale POMDPs by reducing the dimensionality of the belief space. We use Exponential family Principal Components Analysis (Collins, Dasgupta and Schapire, 2002) to represent sparse, high-dimensional belief spaces using small sets of learned features of the belief state. We then plan only in terms of the low-dimensional belief features. By planning in this low-dimensional space, we can find policies for POMDP models that are orders of magnitude larger than models that can be handled by conventional techniques. We demonstrate the use of this algorithm on a synthetic problem and on mobile robot navigation tasks.
Anytime Point-Based Approximations for Large POMDPs
Oct 04, 2011



The Partially Observable Markov Decision Process has long been recognized as a rich framework for real-world planning and control problems, especially in robotics. However exact solutions in this framework are typically computationally intractable for all but the smallest problems. A well-known technique for speeding up POMDP solving involves performing value backups at specific belief points, rather than over the entire belief simplex. The efficiency of this approach, however, depends greatly on the selection of points. This paper presents a set of novel techniques for selecting informative belief points which work well in practice. The point selection procedure is combined with point-based value backups to form an effective anytime POMDP algorithm called Point-Based Value Iteration (PBVI). The first aim of this paper is to introduce this algorithm and present a theoretical analysis justifying the choice of belief selection technique. The second aim of this paper is to provide a thorough empirical comparison between PBVI and other state-of-the-art POMDP methods, in particular the Perseus algorithm, in an effort to highlight their similarities and differences. Evaluation is performed using both standard POMDP domains and realistic robotic tasks.