 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgo2HandsPose: A Dataset for Egocentric Two-hand 3D Global Pose Estimation
Jun 10, 2022
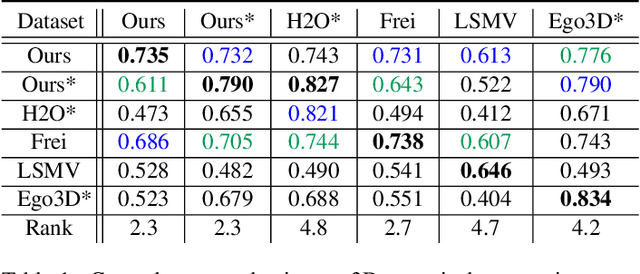
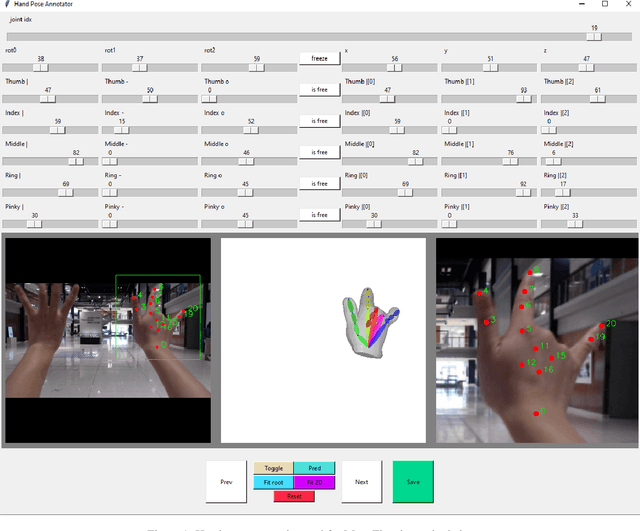
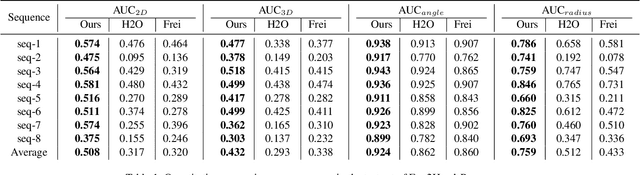
Color-based two-hand 3D pose estimation in the global coordinate system is essential in many applications. However, there are very few datasets dedicated to this task and no existing dataset supports estimation in a non-laboratory environment. This is largely attributed to the sophisticated data collection process required for 3D hand pose annotations, which also leads to difficulty in obtaining instances with the level of visual diversity needed for estimation in the wild. Progressing towards this goal, a large-scale dataset Ego2Hands was recently proposed to address the task of two-hand segmentation and detection in the wild. The proposed composition-based data generation technique can create two-hand instances with quality, quantity and diversity that generalize well to unseen domains. In this work, we present Ego2HandsPose, an extension of Ego2Hands that contains 3D hand pose annotation and is the first dataset that enables color-based two-hand 3D tracking in unseen domains. To this end, we develop a set of parametric fitting algorithms to enable 1) 3D hand pose annotation using a single image, 2) automatic conversion from 2D to 3D hand poses and 3) accurate two-hand tracking with temporal consistency. We provide incremental quantitative analysis on the multi-stage pipeline and show that training on our dataset achieves state-of-the-art results that significantly outperforms other datasets for the task of egocentric two-hand global 3D pose estimation.
Generalizing Interactive Backpropagating Refinement for Dense Prediction
Dec 22, 2021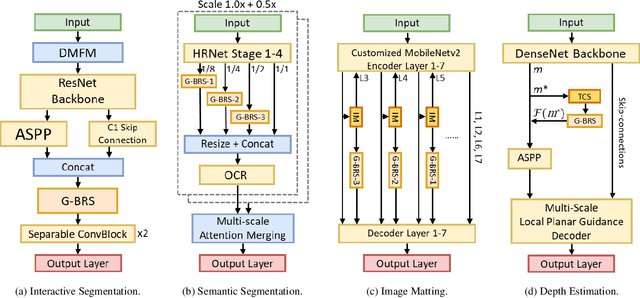
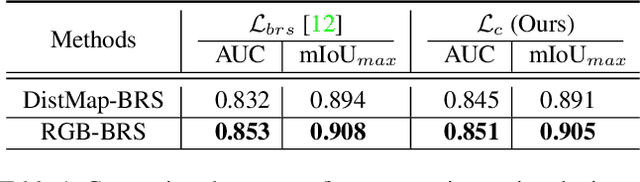

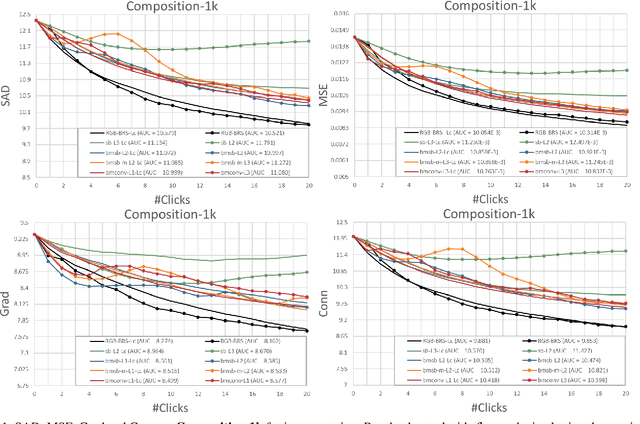
As deep neural networks become the state-of-the-art approach in the field of computer vision for dense prediction tasks, many methods have been developed for automatic estimation of the target outputs given the visual inputs. Although the estimation accuracy of the proposed automatic methods continues to improve, interactive refinement is oftentimes necessary for further correction. Recently, feature backpropagating refinement scheme (f-BRS) has been proposed for the task of interactive segmentation, which enables efficient optimization of a small set of auxiliary variables inserted into the pretrained network to produce object segmentation that better aligns with user inputs. However, the proposed auxiliary variables only contain channel-wise scale and bias, limiting the optimization to global refinement only. In this work, in order to generalize backpropagating refinement for a wide range of dense prediction tasks, we introduce a set of G-BRS (Generalized Backpropagating Refinement Scheme) layers that enable both global and localized refinement for the following tasks: interactive segmentation, semantic segmentation, image matting and monocular depth estimation. Experiments on SBD, Cityscapes, Mapillary Vista, Composition-1k and NYU-Depth-V2 show that our method can successfully generalize and significantly improve performance of existing pretrained state-of-the-art models with only a few clicks.
Ego2Hands: A Dataset for Egocentric Two-hand Segmentation and Detection
Nov 17, 2020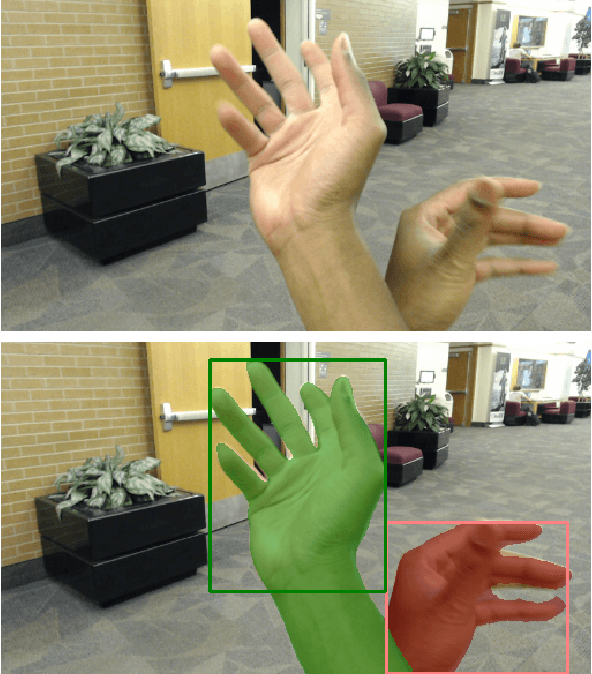

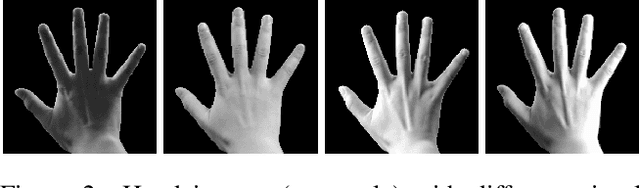
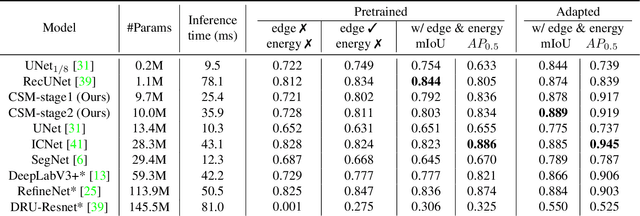
Hand segmentation and detection in truly unconstrained RGB-based settings is important for many applications. However, existing datasets are far from sufficient both in terms of size and variety due to the infeasibility of manual annotation of large amounts of segmentation and detection data. As a result, current methods are limited by many underlying assumptions such as constrained environment, consistent skin color and lighting. In this work, we present a large-scale RGB-based egocentric hand segmentation/detection dataset Ego2Hands that is automatically annotated and a color-invariant compositing-based data generation technique capable of creating unlimited training data with variety. For quantitative analysis, we manually annotated an evaluation set that significantly exceeds existing benchmarks in quantity, diversity and annotation accuracy. We show that our dataset and training technique can produce models that generalize to unseen environments without domain adaptation. We introduce Convolutional Segmentation Machine (CSM) as an architecture that better balances accuracy, size and speed and provide thorough analysis on the performance of state-of-the-art models on the Ego2Hands dataset.
Two-hand Global 3D Pose Estimation Using Monocular RGB
Jun 01, 2020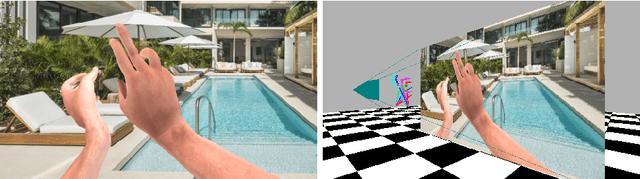
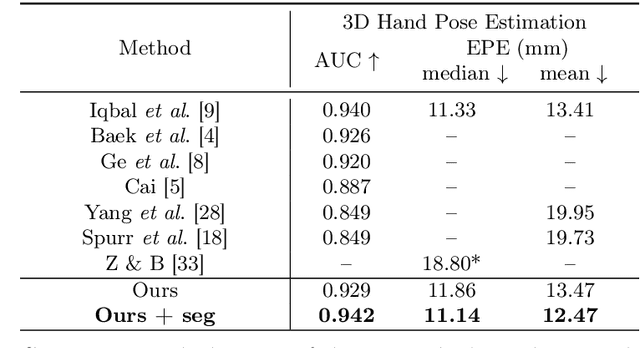

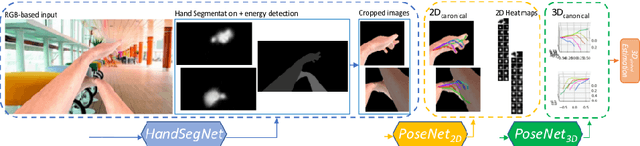
We tackle the challenging task of estimating global 3D joint locations for both hands via only monocular RGB input images. We propose a novel multi-stage convolutional neural network based pipeline that accurately segments and locates the hands despite occlusion between two hands and complex background noise and estimates the 2D and 3D canonical joint locations without any depth information. Global joint locations with respect to the camera origin are computed using the hand pose estimations and the actual length of the key bone with a novel projection algorithm. To train the CNNs for this new task, we introduce a large-scale synthetic 3D hand pose dataset. We demonstrate that our system outperforms previous works on 3D canonical hand pose estimation benchmark datasets with RGB-only information. Additionally, we present the first work that achieves accurate global 3D hand tracking on both hands using RGB-only inputs and provide extensive quantitative and qualitative evaluation.