 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWorkspace Analysis for Laparoscopic Rectal Surgery : A Preliminary Study
Feb 22, 2024The integration of medical imaging, computational analysis, and robotic technology has brought about a significant transformation in minimally invasive surgical procedures, particularly in the realm of laparoscopic rectal surgery (LRS). This specialized surgical technique, aimed at addressing rectal cancer, requires an in-depth comprehension of the spatial dynamics within the narrow space of the pelvis. Leveraging Magnetic Resonance Imaging (MRI) scans as a foundational dataset, this study incorporates them into Computer-Aided Design (CAD) software to generate precise three-dimensional (3D) reconstructions of the patient's anatomy. At the core of this research is the analysis of the surgical workspace, a critical aspect in the optimization of robotic interventions. Sophisticated computational algorithms process MRI data within the CAD environment, meticulously calculating the dimensions and contours of the pelvic internal regions. The outcome is a nuanced understanding of both viable and restricted zones during LRS, taking into account factors such as curvature, diameter variations, and potential obstacles. This paper delves deeply into the complexities of workspace analysis for robotic LRS, illustrating the seamless collaboration between medical imaging, CAD software, and surgical robotics. Through this interdisciplinary approach, the study aims to surpass traditional surgical methodologies, offering novel insights for a paradigm shift in optimizing robotic interventions within the complex environment of the pelvis.
Stacked Tensegrity Mechanism for Medical Application
Apr 04, 2022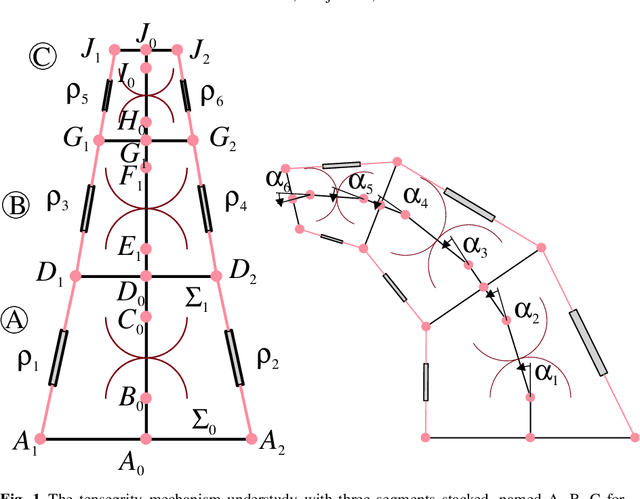
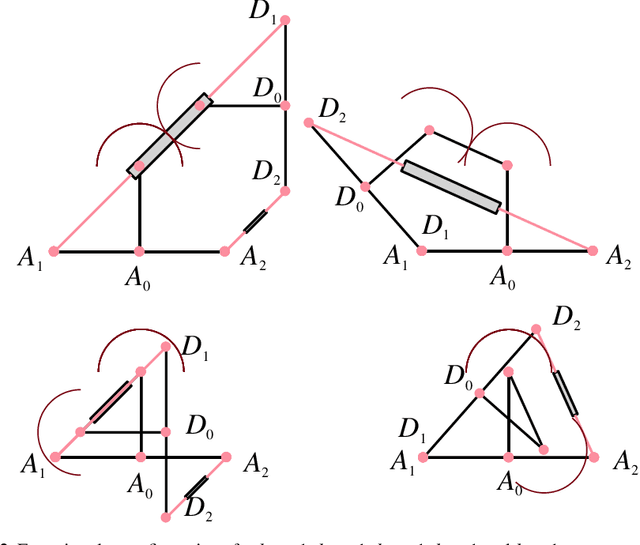
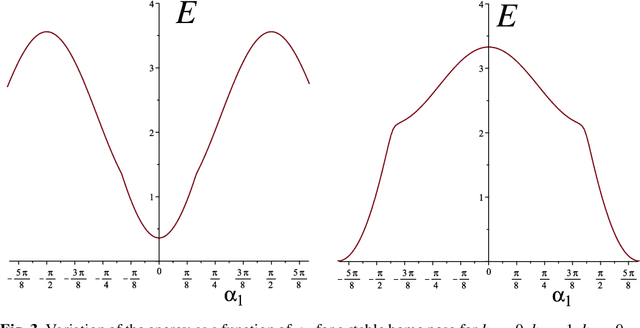
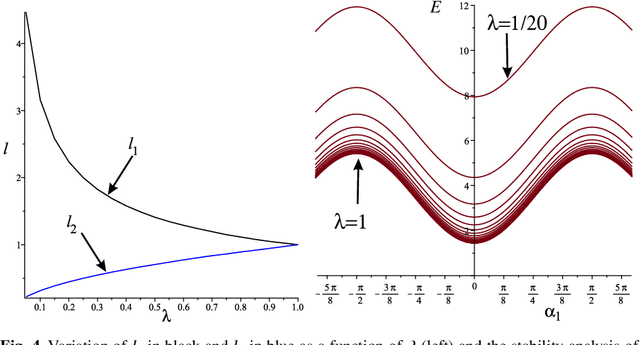
In this article a multi-segmented planar tensegrity mechanism was presented. This mechanism has a three-segment structure with each segment residing on top of another. The size of the segments may decrease proportionally from base to top, resulting in a tapered shape from base to tip like an elephant trunk. The system was mechanically formulated as having linear springs and cables functioning as actuators. The singularities, as well as the stability of the parallel mechanism, were analyzed by using the principle of minimum energy. Optimization was also done to obtain the greatest angular deflection for a segment according to a ratio between the size of the base and the moving platform of the robotic system. The result of this work is a family of mechanisms that can generate the same workspace for different stability properties.