 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeleoperation of Continuum Instruments: Investigation of Linear vs. Angular Commands through Task-Priority Analysis
Dec 08, 2024



This paper addresses the challenge of teleoperating continuum instruments for minimally invasive surgery (MIS). We develop and adopt a novel task-priority-based kinematic formulation to quantitatively investigate teleoperation commands for continuum instruments under remote center of motion (RCM) constraints. Using redundancy resolution methods, we investigate the kinematic performance during teleoperation, comparing linear and angular commands within a task-priority scheme. For experimental validation, an instrument module (IM) was designed and integrated with a 7-DoF manipulator. Assessments, simulations, and experimental validations demonstrated the effectiveness of the proposed framework. The experiments involved several tasks: trajectory tracking of the IM tip along multiple paths with varying priorities for linear and angular teleoperation commands, pushing a ball along predefined paths on a silicon board, following a pattern on a pegboard, and guiding the continuum tip through rings on a ring board using a standard surgical kit.
Teleoperation in Robot-assisted MIS with Adaptive RCM via Admittance Control
Jul 17, 2024



This paper presents the development and assessment of a teleoperation framework for robot-assisted minimally invasive surgery (MIS). The framework leverages our novel integration of an adaptive remote center of motion (RCM) using admittance control. This framework operates within a redundancy resolution method specifically designed for the RCM constraint. We introduce a compact, low-cost, and modular custom-designed instrument module (IM) that ensures integration with the manipulator, featuring a force-torque sensor, a surgical instrument, and an actuation unit for driving the surgical instrument. The paper details the complete teleoperation framework, including the telemanipulation trajectory mapping, kinematic modelling, control strategy, and the integrated admittance controller. Finally, the system capability to perform various surgical tasks was demonstrated, including passing a thread through the rings, picking and placing objects, and trajectory tracking.
Hybrid Force Motion Control with Estimated Surface Normal for Manufacturing Applications
Apr 05, 2024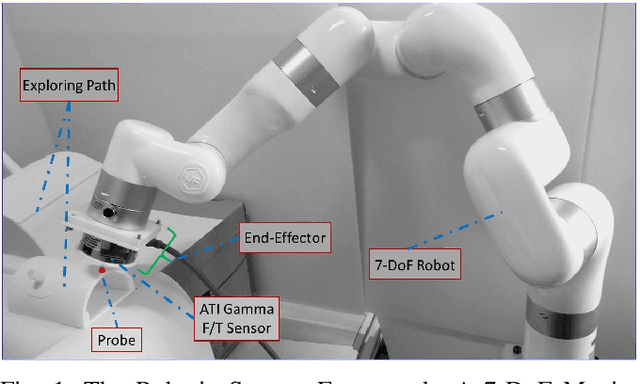

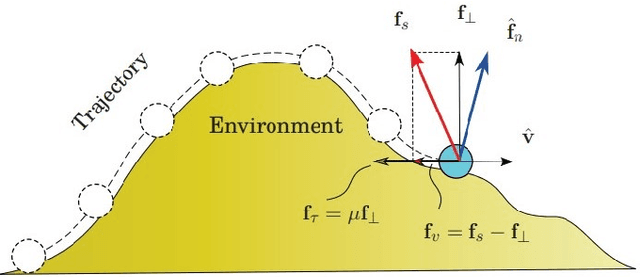
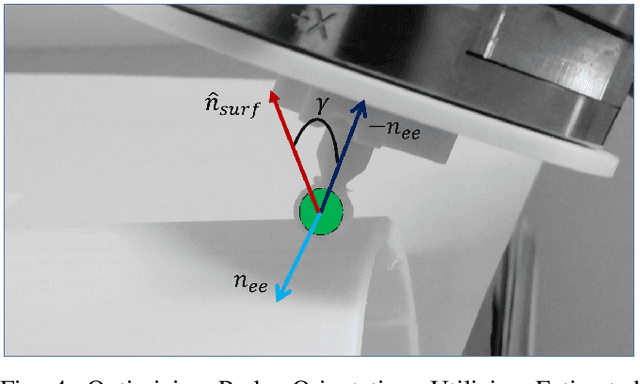
This paper proposes a hybrid force-motion framework that utilizes real-time surface normal updates. The surface normal is estimated via a novel method that leverages force sensing measurements and velocity commands to compensate the friction bias. This approach is critical for robust execution of precision force-controlled tasks in manufacturing, such as thermoplastic tape replacement that traces surfaces or paths on a workpiece subject to uncertainties deviated from the model. We formulated the proposed method and implemented the framework in ROS2 environment. The approach was validated using kinematic simulations and a hardware platform. Specifically, we demonstrated the approach on a 7-DoF manipulator equipped with a force/torque sensor at the end-effector.
Admittance Control for Adaptive Remote Center of Motion in Robotic Laparoscopic Surgery
Apr 05, 2024



In laparoscopic robot-assisted minimally invasive surgery, the kinematic control of the robot is subject to the remote center of motion (RCM) constraint at the port of entry (e.g., trocar) into the patient's body. During surgery, after the instrument is inserted through the trocar, intrinsic physiological movements such as the patient's heartbeat, breathing process, and/or other purposeful body repositioning may deviate the position of the port of entry. This can cause a conflict between the registered RCM and the moved port of entry. To mitigate this conflict, we seek to utilize the interaction forces at the RCM. We develop a novel framework that integrates admittance control into a redundancy resolution method for the RCM kinematic constraint. Using the force/torque sensory feedback at the base of the instrument driving mechanism (IDM), the proposed framework estimates the forces at RCM, rejects forces applied on other locations along the instrument, and uses them in the admittance controller. In this paper, we report analysis from kinematic simulations to validate the proposed framework. In addition, a hardware platform has been completed, and future work is planned for experimental validation.