 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Personalizable Controller for the Walking Assistive omNi-Directional Exo-Robot (WANDER)
May 07, 2024



Preserving and encouraging mobility in the elderly and adults with chronic conditions is of paramount importance. However, existing walking aids are either inadequate to provide sufficient support to users' stability or too bulky and poorly maneuverable to be used outside hospital environments. In addition, they all lack adaptability to individual requirements. To address these challenges, this paper introduces WANDER, a novel Walking Assistive omNi-Directional Exo-Robot. It consists of an omnidirectional platform and a robust aluminum structure mounted on top of it, which provides partial body weight support. A comfortable and minimally restrictive coupling interface embedded with a force/torque sensor allows to detect users' intentions, which are translated into command velocities by means of a variable admittance controller. An optimization technique based on users' preferences, i.e., Preference-Based Optimization (PBO) guides the choice of the admittance parameters (i.e., virtual mass and damping) to better fit subject-specific needs and characteristics. Experiments with twelve healthy subjects exhibited a significant decrease in energy consumption and jerk when using WANDER with PBO parameters as well as improved user performance and comfort. The great interpersonal variability in the optimized parameters highlights the importance of personalized control settings when walking with an assistive device, aiming to enhance users' comfort and mobility while ensuring reliable physical support.
Uncertainty-Aware Organ Classification for Surgical Data Science Applications in Laparoscopy
Oct 19, 2018
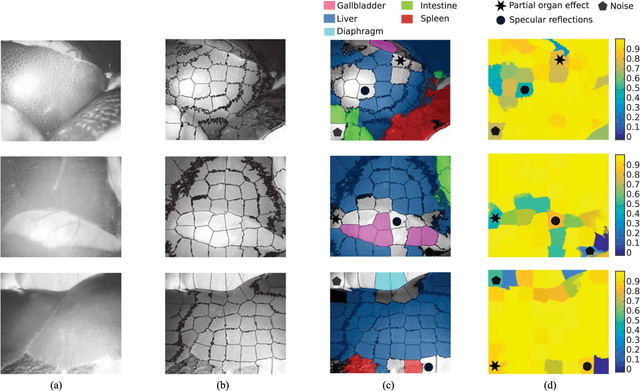


Objective: Surgical data science is evolving into a research field that aims to observe everything occurring within and around the treatment process to provide situation-aware data-driven assistance. In the context of endoscopic video analysis, the accurate classification of organs in the field of view of the camera proffers a technical challenge. Herein, we propose a new approach to anatomical structure classification and image tagging that features an intrinsic measure of confidence to estimate its own performance with high reliability and which can be applied to both RGB and multispectral imaging (MI) data. Methods: Organ recognition is performed using a superpixel classification strategy based on textural and reflectance information. Classification confidence is estimated by analyzing the dispersion of class probabilities. Assessment of the proposed technology is performed through a comprehensive in vivo study with seven pigs. Results: When applied to image tagging, mean accuracy in our experiments increased from 65% (RGB) and 80% (MI) to 90% (RGB) and 96% (MI) with the confidence measure. Conclusion: Results showed that the confidence measure had a significant influence on the classification accuracy, and MI data are better suited for anatomical structure labeling than RGB data. Significance: This work significantly enhances the state of art in automatic labeling of endoscopic videos by introducing the use of the confidence metric, and by being the first study to use MI data for in vivo laparoscopic tissue classification. The data of our experiments will be released as the first in vivo MI dataset upon publication of this paper.