 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA new model-free design for vehicle control and its validation through an advanced simulation platform
Mar 24, 2015
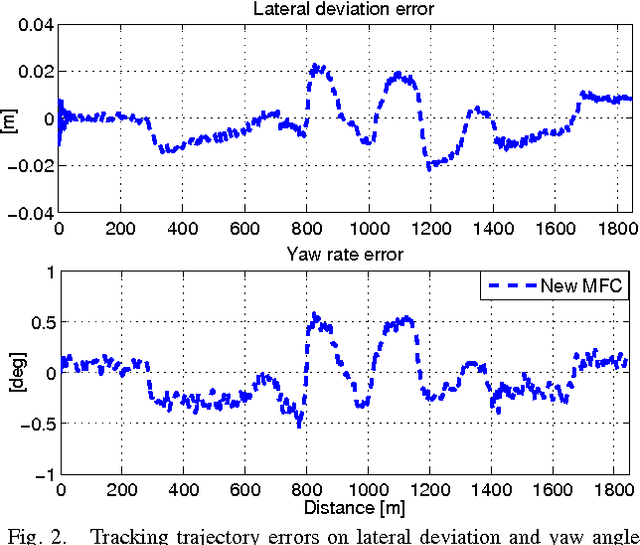


A new model-free setting and the corresponding "intelligent" P and PD controllers are employed for the longitudinal and lateral motions of a vehicle. This new approach has been developed and used in order to ensure simultaneously a best profile tracking for the longitudinal and lateral behaviors. The longitudinal speed and the derivative of the lateral deviation, on one hand, the driving/braking torque and the steering angle, on the other hand, are respectively the output and the input variables. Let us emphasize that a "good" mathematical modeling, which is quite difficult, if not impossible to obtain, is not needed for such a design. An important part of this publication is focused on the presentation of simulation results with actual and virtual data. The actual data, used in Matlab as reference trajectories, have been obtained from a properly instrumented car (Peugeot 406). Other virtual sets of data have been generated through the interconnected platform SiVIC/RTMaps. It is a dedicated virtual simulation platform for prototyping and validation of advanced driving assistance systems. Keywords- Longitudinal and lateral vehicle control, model-free control, intelligent P controller (i-P controller), algebraic estimation, ADAS (Advanced Driving Assistance Systems).
Multi-objects association in perception of dynamical situation
Jan 23, 2013



In current perception systems applied to the rebuilding of the environment for intelligent vehicles, the part reserved to object association for the tracking is increasingly significant. This allows firstly to follow the objects temporal evolution and secondly to increase the reliability of environment perception. We propose in this communication the development of a multi-objects association algorithm with ambiguity removal entering into the design of such a dynamic perception system for intelligent vehicles. This algorithm uses the belief theory and data modelling with fuzzy mathematics in order to be able to handle inaccurate as well as uncertain information due to imperfect sensors. These theories also allow the fusion of numerical as well as symbolic data. We develop in this article the problem of matching between known and perceived objects. This makes it possible to update a dynamic environment map for a vehicle. The belief theory will enable us to quantify the belief in the association of each perceived object with each known object. Conflicts can appear in the case of object appearance or disappearance, or in the case of a confused situation or bad perception. These conflicts are removed or solved using an assignment algorithm, giving a solution called the " best " and so ensuring the tracking of some objects present in our environment.