 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti Agent Path Finding with Awareness for Spatially Extended Agents
Sep 20, 2020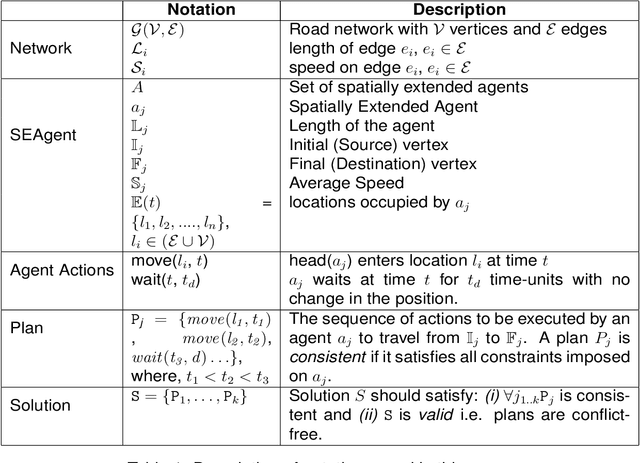
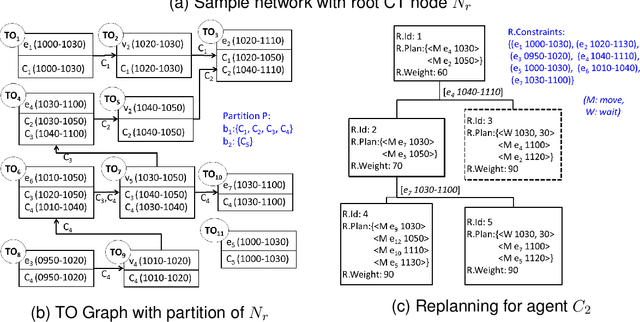
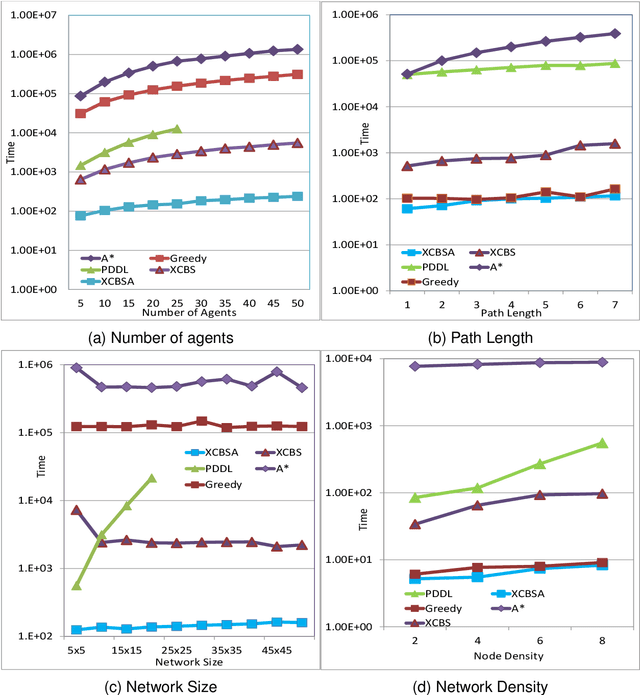
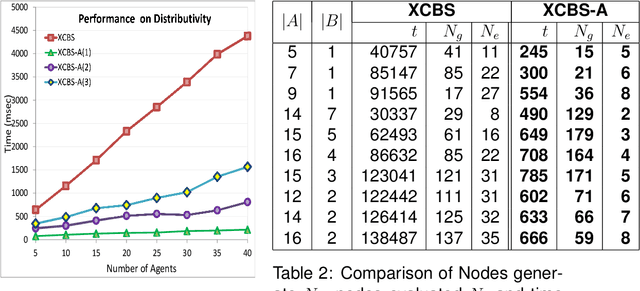
Path finding problems involve identification of a plan for conflict free movement of agents over a common road network. Most approaches to this problem handle the agents as point objects, wherein the size of the agent is significantly smaller than the road on which it travels. In this paper, we consider spatially extended agents which have a size comparable to the length of the road on which they travel. An optimal multi agent path finding approach for spatially-extended agents was proposed in the eXtended Conflict Based Search (XCBS) algorithm. As XCBS resolves only a pair of conflicts at a time, it results in deeper search trees in case of cascading or multiple (more than two agent) conflicts at a given location. This issue is addressed in eXtended Conflict Based Search with Awareness (XCBS-A) in which an agent uses awareness of other agents' plans to make its own plan. In this paper, we explore XCBS-A in greater detail, we theoretically prove its completeness and empirically demonstrate its performance with other algorithms in terms of variances in road characteristics, agent characteristics and plan characteristics. We demonstrate the distributive nature of the algorithm by evaluating its performance when distributed over multiple machines. XCBS-A generates a huge search space impacting its efficiency in terms of memory; to address this we propose an approach for memory-efficiency and empirically demonstrate the performance of the algorithm. The nature of XCBS-A is such that it may lead to suboptimal solutions, hence the final contribution of this paper is an enhanced approach, XCBS-Local Awareness (XCBS-LA) which we prove will be optimal and complete.
Solving a Path Planning Problem in a Partially Known Environment using a Swarm Algorithm
May 09, 2017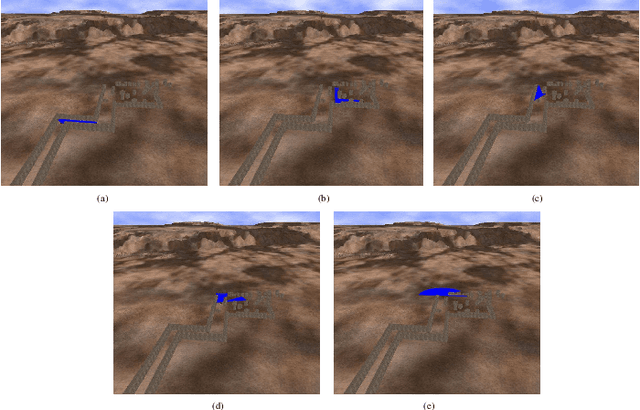
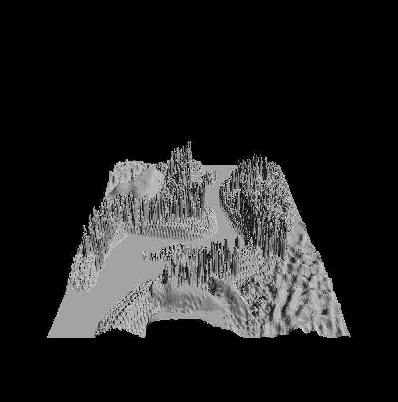
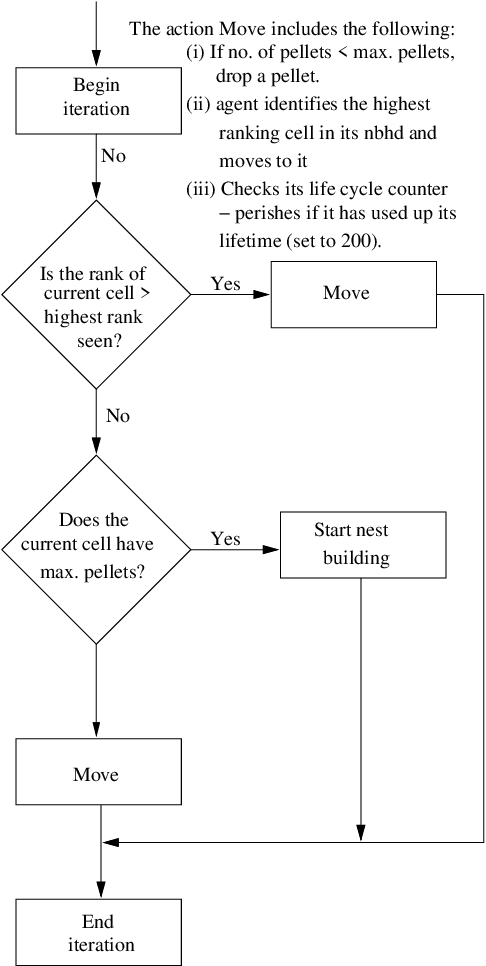
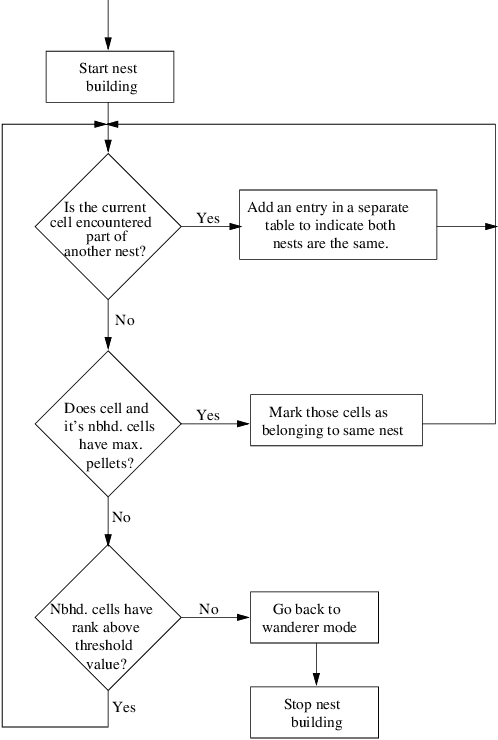
This paper proposes a path planning strategy for an Autonomous Ground Vehicle (AGV) navigating in a partially known environment. Global path planning is performed by first using a spatial database of the region to be traversed containing selected attributes such as height data and soil information from a suitable spatial database. The database is processed using a biomimetic swarm algorithm that is inspired by the nest building strategies followed by termites. Local path planning is performed online utilizing information regarding contingencies that affect the safe navigation of the AGV from various sensors. The simulation discussed has been implemented on the open source Player-Stage-Gazebo platform.