 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePropagation Distance Estimation for Radio over Fiber with Cascaded Structure
Oct 03, 2024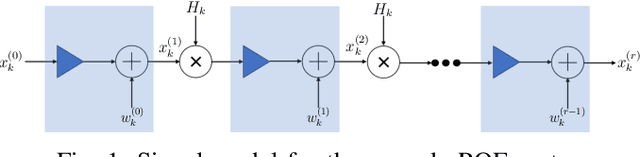
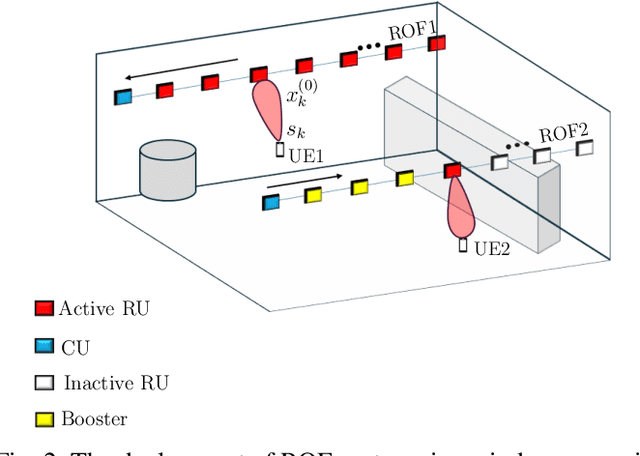
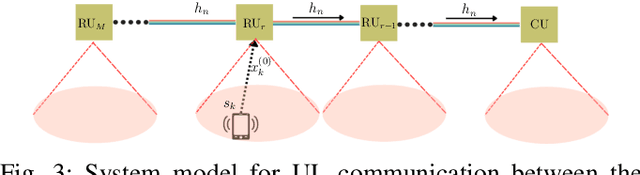
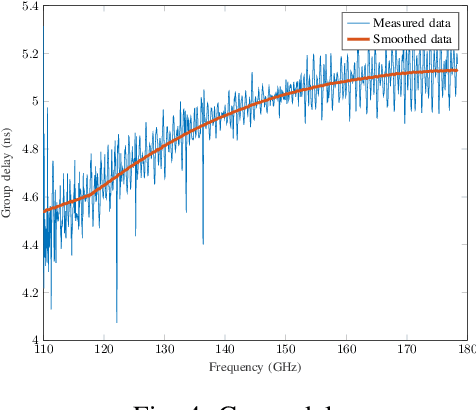
Recent developments in polymer microwave fiber (PMF) have opened great opportunities for robust, low-cost, and high-speed sub-terahertz (THz) communications. Noticing this great potential, this paper addresses the problem of estimation of the propagation distance of a sub-Thz signal along a radio over fiber structure. Particularly, this paper considers a novel cascaded structure that interconnects multiple radio units (RUs) via fiber for applications in indoor scenarios. Herein, we consider the cascaded effects of distortions introduced by non-linear power amplifiers at the RUs, and the propagation channel over the fiber is based on measurements obtained from transmissions of sub-THz signals on high-density polyethylene fibers. For the estimation of the propagation distance, non-linear least-squares algorithms are proposed, and our simulation results demonstrate that the proposed estimators present a good performance on the propagation distance estimation even in the presence of the cascaded effect of non-linear PAs.
Strategic Deployment of Swarm of UAVs for Secure IoT Networks
Sep 10, 2023Security provisioning for low-complex and constrained devices in the Internet of Things (IoT) is exacerbating the concerns for the design of future wireless networks. To unveil the full potential of the sixth generation (6G), it is becoming even more evident that security measurements should be considered at all layers of the network. This work aims to contribute in this direction by investigating the employment of unmanned aerial vehicles (UAVs) for providing secure transmissions in ground IoT networks. Toward this purpose, it is considered that a set of UAVs acting as aerial base stations provide secure connectivity between the network and multiple ground nodes. Then, the association of IoT nodes, the 3D positioning of the UAVs and the power allocation of the UAVs are obtained by leveraging game theoretic and convex optimization-based tools with the goal of improving the secrecy of the system. It is shown that the proposed framework obtains better and more efficient secrecy performance over an IoT network than state-of-the-art greedy algorithms for positioning and association.
Multi UAV-enabled Distributed Sensing: Cooperation Orchestration and Detection Protocol
Sep 10, 2023



This paper proposes an unmanned aerial vehicle (UAV)-based distributed sensing framework that uses orthogonal frequency-division multiplexing (OFDM) waveforms to detect the position of a ground target, and UAVs operate in half-duplex mode. A spatial grid approach is proposed, where an specific area in the ground is divided into cells of equal size, then the radar cross-section (RCS) of each cell is jointly estimated by a network of dual-function UAVs. For this purpose, three estimation algorithms are proposed employing the maximum likelihood criterion, and digital beamforming is used for the local signal acquisition at the receive UAVs. It is also considered that the coordination, fusion of sensing data, and central estimation is performed at a certain UAV acting as a fusion center (FC). Monte Carlo simulations are performed to obtain the absolute estimation error of the proposed framework. The results show an improved accuracy and resolution by the proposed framework, if compared to a single monostatic UAV benchmark, due to the distributed approach among the UAVs. It is also evidenced that a reduced overhead is obtained when compared to a general compressive sensing (CS) approach.