Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan a Tesla Turbine be Utilised as a Non-Magnetic Actuator for MRI-Guided Robotic Interventions?
Aug 19, 2021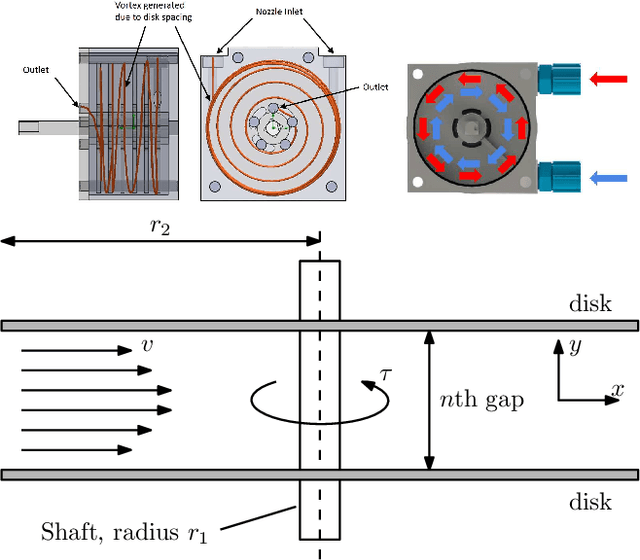
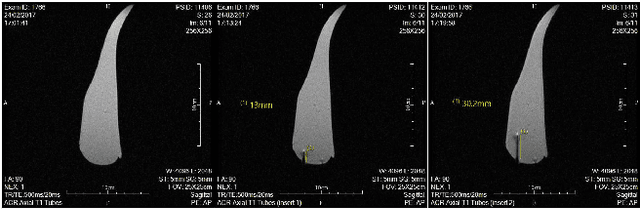
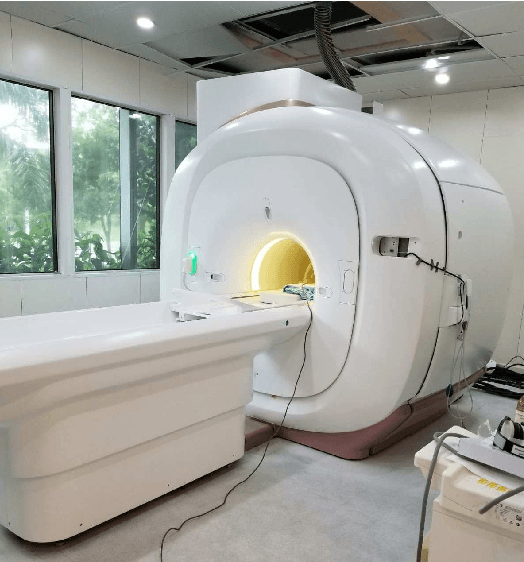
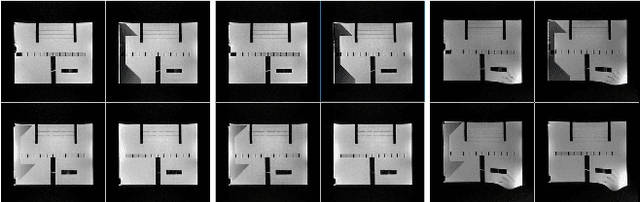
This paper introduces a new type of nonmagnetic actuator for MRI interventions. Ultrasonic and piezoelectric motors are one the most commonly used actuators in MRI applications. However, most of these actuators are only MRI-safe, which means they cannot be operated while imaging as they cause significant visual artifacts. To cope with this issue, we developed a new pneumatic rotary servo-motor (based on the Tesla turbine) that can be effectively used during continuous MR imaging. We thoroughly tested the performance and magnetic properties of our MRI-compatible actuator with several experiments, both inside and outside an MRI scanner. The reported results confirm the feasibility to use this motor for MRI-guided robotic interventions.
Via